Датчики: общее описание и терминология

Компания TML является одной из немногих компаний (помимо таких как HBM, Kyowa), производящих свои тензометрические датчики на основе тензорезисторов собственного производства. Этим обусловлено высочайшее качество изделий. Линейка производимых тензометрических датчиков достаточно обширна. это и датчики силы, веса, перемещения, крутящего момента, давления, акселерометры, инклинометры, специализированные датчики для строительного мониторинга, для испытаний автотранспорта и т.п. Каждый из них в свою очередь разделяется по критериям диапазона использования, номинальным значениям, точности и т.д. В связи с этим, иногда, с подбором необходимого датчика возникают сложности, особенно по причине применения различной терминологии при описании характеристик датчиков. Разрешению вопроса различий в применяемой терминологии и посвящен данный раздел.
Общее описание
Компания TML уже более полувека способствует мировому развитию и продвижению тензометрической продукции, имеющей огромное значение для исследований, разработок и конструирования всевозможных измерительных систем. На базе технологических ноу-хау в тензометрии и научно-исследовательских разработок компанией TML налажено производство широкой гаммы всевозможных датчиков – начиная от стандартных и специализированных тензорезисторов, и заканчивая первичными преобразователями веса, ускорения, крутящего момента, деформации, перемещения, давления, уровня, температуры и др. Для комплексного решения задач измерения и анализа, компания предлагает широкую линейку вторичных преобразователей и электронных компонентов: различные регистрирующие устройства, вторичные преобразователи, измерительные усилители, многоканальные коммутаторы, цифровые индикаторы, блоки для радиотелеметрической передачи данных, приборы с высоким быстродействием для регистрации данных в динамике. Наряду с развитием измерительной электроники специалисты компании совершенствуют и палитру программного обеспечения, помогающего производить не только регистрацию данных, но и обеспечивать их визуализацию, обработку и оперативный анализ. Речь в этой статье пойдет про датчики производства TML: их общее описание и используемую терминологию.
Мостовая схема датчика и способ подключения
Мостовая схема датчика и способ подключения приведены ниже, она неприменима к некоторым продуктам.
Если требуется специализированный разъем, об этом необходимо указать в заказе.
Входное/выходное сопротивление датчика
| Сопротивление вход-выход (Ом) | Расположение контактов в разъеме и сопротивление между проводами (Ом) | |||||
|---|---|---|---|---|---|---|
| A-C Кр-Чер | B-D Зел-Бел | A-B Кр-Зел | A-D Кр-Бел | B-C Зел-Чер | C-D Чер-Бел | |
| 120 | 120 | 120 | 90 | 90 | 90 | 90 |
| 350 | 350 | 350 | 263 | 263 | 263 | 263 |
Измерения методом постоянного напряжения и методом постоянного тока
Метод постоянного напряжения
В этом методе напряжение питания моста (напряжение между контактами А и С тензометрического оборудования) сохраняется постоянным. В нашем оборудовании обычно используется этот метод, а наши датчики этим методом чаще калибруются. При удлинении провода, подсоединенного к датчику, необходима корректировка чувствительности (калибровочного коэффициента) датчика.
Метод постоянного тока
В этом методе ток питания моста (ток, идущий между контактами А и С тензометрического оборудования) сохраняется постоянным. Преимущество этого метода в том, что показания датчика не падают даже при удлинении провода датчика. Однако, сопротивление датчика на входе/выходе должно иметь определенную величину (обычно 120 или 350 Ом). Кроме того, чувствительность (калибровочный коэффициент) датчика для методов постоянного напряжения и постоянного тока может отличаться.
Выходной сигнал и величина деформации
Выходной сигнал (номинальное значение) датчика выражается в мВ/В. Это выходное напряжение при максимальной нагрузке на датчик. Оно показывает выходное напряжение, когда подается напряжение 1 В.
Пример:
1.5 мВ/В означает, что на выходе 1.5 мВ при максимально допустимой нагрузке на датчик, при этом на мост подается питание 1 В. Если на мост подается 2 В, то:
Таким образом, если коэффициент тензочувствительности равен 2.00, то выходное напряжение датчика 3 мВ, а на тензометрическом оборудовании должно отображаться значение, которое можно посчитать по следующей формуле:
где Δe: Выходное напряжение датчика
E : Входное напряжение возбуждения
K : Коэффициент тензочувствительности
ɛ : Показание на тензометрическом оборудовании
При K, E и Δe равных 2.00, 2 В, и 3 мВ соответственно, и, учитывая, что 3 мВ = 0,003 В, получим:
ɛ = 0.003 = 3000 × 10 -6 strain
При коэффициенте тензочувствительности тензометрического оборудования равном 2,00 и входном напряжении 1 В получим для выходного напряжения следующее:
2Δe = ɛ, тогда
1 мВ/В = 2000 x 10 -6 strain
2 мВ/В = 4000 x 10 -6 strain
Пониженная чувствительность из-за длины провода, присоединенного к датчику
При измерении методом постоянного напряжения и удлинении провода датчика относительно исходного откалиброванного провода (калибровка показана в данных испытаний — test data) показание датчика уменьшается. Показание (калибровочный коэффициент) приведено в следующей формуле. Поправка должна быть сделана, используя при необходимости эту формулу:
Удельное сопротивление провода, подсоединенного к датчику
| Площадь сечения (кв. мм) | Общее удельное сопротивление (Ом/м) |
|---|---|
| 0.005 | 7.2 |
| 0.05 | 0.63 |
| 0.08 | 0.44 |
| 0.09 | 0.4 |
| 0.14 | 0.25 |
| 0.3 | 0.12 |
| 0.35 | 0.11 |
| 0.5 | 0.07 |
| 0.75 | 0.048 |
Поддержка TEDS
Аббревиатура TEDS означает электронную техническую спецификацию датчика. TEDS-совместимый датчик имеет информацию о сенсоре, соответствующую IEEE1451.4 по внутренним электронным данным. Это позволяет автоматический ввод в измерительный прибор информации о сенсоре, включающий чувствительность и серийный номер. Такая автоматизация позволяет избежать неверных настроек, значительно снижает время для настройки и делает работу более эффективной и простой. Для более детального описания TEDS-совместимых датчиков и измерительных приборов можете связаться с нами.
Терминология
Пределы измерения — это максимальная нагрузка, которую способен измерить датчик, оставаясь в пределах своих технических характеристик.
Номинальный выход (RO) — это выход при номинальной нагрузке за вычетом выхода в условиях отсутствия нагрузки. Номинальный выход выражается в мВ на один вольт, подаваемый на датчик (мВ/В).
Нелинейность — это максимальное отклонение показания выходного сигнала датчика от линии, соединяющей исходную точку калибровочной кривой с точкой номинальной нагрузки при ее увеличении. Нелинейность выражается в процентах от номинального выхода (%RO).

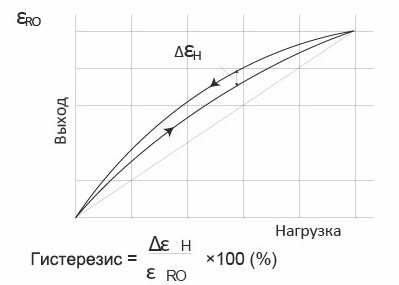
Гистерезис — это максимальная разность выходного сигнала датчика при увеличении и уменьшении нагрузки. Гистерезис выражается в процентах от номинального выхода (%RO).
Сходимость (повторяемость) — это максимальная разность выходных сигналов при многократном измерении одной и той же номинальной нагрузки в одинаковых условиях нагружения и окружающей среды. Сходимость выражается в процентах от номинального выхода (%RO).
Влияние температуры на ноль — это значение выходного сигнала датчика, вызванного изменением температуры окружающей среды. Выражается в изменении выходного сигнала датчика в %% от номинального выхода при изменении температуры на 1°C (%RO/°C).
Влияние температуры на диапазон измерения — это величина изменения номинального выхода, вызванного изменением температуры окружающей среды. Влияние температуры на диапазон измерения выражается в процент ах при изменении температуры на 1°C (%/°C).
Диапазон термокомпенсации — это диапазон температур, в котором компенсируется эффект влияния температуры на ноль и на диапазон измерения.
Допустимый диапазон температуры — это диапазон температуры, в котором датчик может работать непрерывно без необратимых деструктивных изменений (°C).
Перегрузка — это значение непрерывной нагрузки на датчик, которая не вызывает необратимых деструктивных изменений, выходящих за пределы его технических/метрологических характеристик (%).
Предельная перегрузка — это максимальная непрерывная нагрузка, механически не вызывающая необратимых деструктивных изменений (%).
Рекомендуемое напряжение питания — это напряжение, подаваемое на датчик, при котором он остается в пределах своих технических/метрологических характеристик (В).
Допустимое напряжение питания — это максимальное напряжение, непрерывно подаваемое на датчик, не вызывающее его необратимого повреждения (В).
Баланс нуля — это выходная деформация при отсутствии нагрузки (%RO).
Частотная характеристика — это максимальная частота выходного сигнала датчика в заданном диапазоне при использовании синусоидальной нагрузки (Гц).
Собственная частота — это приблизительное значение частоты в ненагруженном состоянии, при котором датчик совершает свободные колебания (Гц).
Допустимый изгибающий момент — это максимальный изгибающий момент, непрерывно воздействующий на датчик и не вызывающий его необратимого повреждения (кН·м).
Чувствительность — это Выходной сигнал датчика при фиксированной нагрузке. Чувствительность выражается в значении величины выходного сигнала тензометра на 1 мм (*10 -6 strain/мм), когда калибровочный коэффициент для датчика перемещения на тензометре установлен равным 1.000 (коэффициент тензочувствительности 2.00).
База датчика — это расстояние между двумя точками, относительно которых происходит измерение перемещения или деформации.
Жесткость пружины — это приблизительное значение усилия, которое необходимо приложить на подпружиненный шток датчика перемещения для измерения величины перемещения (Н).
Входное/выходное сопротивление — это сопротивление между входными и выходными клеммами, измеренное в условиях отсутствия нагрузки при отключенных входных и выходных клеммах (Ом).
Кабель ввода-вывода — кабель, который невозможно отсоединить от датчика.
Поставляемый кабель — стандартный кабель, который поставляется в комплекте с датчиком и его можно присоединить/отсоединить от датчика.
Вес — приблизительный вес датчика без учета кабеля и разъемов.
Источник
Характеристики датчиков.
Датчик должен воспроизводить физическую величину максимально быстро и точно. Хотя чаще всего датчик выбирают исходя из надежности и удобства обслуживания, его точность, стабильность и повторяемость результатов остаются важнейшими факторами. Основой работы управляющего компьютера является входная информация, поэтому точные и надежные измерения — это необходимое условие качества управления.
Большая часть характеристик датчика, которые приводятся в техническом описании, — статические параметры. Эти параметры не показывают, насколько быстро и точно датчик может измерить сигнал, изменяющийся с большой скоростью. Свойства, отражающие работу датчика в условиях изменяющихся входных воздействий, называются динамическими характеристиками. Они существенно влияют на работу системы управления. Идеальный датчик мгновенно реагирует на изменение измеряемой физической величины. На практике любому датчику необходимо некоторое время на отработку нового входного сигнала. Очевидно, что для адекватного отображения реальных изменений наблюдаемой величины время реакции датчика должно быть как можно меньше. Это тот же самый принцип, который применяется ко всей системе управления (компьютеру) процессом реального времени в целом: временные характеристики физического процесса определяют быстродействие системы (производительность компьютера). Однако чаще требуется компромисс между скоростью реакции датчика и его чувствительностью к шуму.
Рассматривая датчики используемые СаиУ необходимо знать характеристики определяющие особенности их работы, при этом различают статические и динамические характеристики, кроме них для датчиков характерны такие параметры, как:
— погрешность (ошибка) измерения.
Точность датчика определяет разницу между измеренной и действительной величиной; она может быть отнесена к датчику в целом или к конкретному его показанию. Точность датчика зависит не только от его аппаратной части, но и от остальных элементов измерительного комплекса.
Разрешение —это наименьшее отклонение измеряемой величины, которое может быть зафиксировано и отражено датчиком. Разрешение намного чаще, чем точность, указывается в технических описаниях.
Погрешность (ошибка) измерения определяется как разница между измеренной и действительной величинами.
Ошибки измерения можно классифицировать и, соответственно, моделировать как детерминированные (или систематические) и случайные (или стохастические). Детерминированные ошибки связаны с неисправностью датчика, нарушением условий его применения или процедуры измерений. Эти ошибки повторяются при каждом измерении. Типичная систематическая ошибка — это смещение показаний или сдвиг. В принципе, систематические ошибки устраняются при поверках. Случайные ошибки имеют самое разное происхождение. В большинстве случаев — это влияние окружающей среды (температуры, влажности, электрических наводок и т. п.). Если причины случайных ошибок известны, то эти ошибки можно компенсировать. Часто влияние возмущений характеризуют количественно такими параметрами, как средняя ошибка, среднеквадратичная ошибка или стандартное отклонениеи разброс либо погрешность.
Динамические характеристики датчиков
Динамические свойства датчика характеризуются целым рядом параметров, которые, однако, довольно редко приводятся в технических описаниях производителей. Динамическую характеристику датчика можно экспериментально получить как реакцию на скачок измеряемой входной величины (рис.2.5).
 |
Параметры, описывающие реакцию датчика, дают представление о его скорости (например, время нарастания, запаздывание, время достижения первого максимума), инерционных свойствах (относительное перерегулирование, время установления) и точности (смещение).
В принципе следует стремиться к минимизации следующих параметров.
· Время прохождения зоны нечувствительности— время между началом изменения физической величины и моментом реакции датчика, т. е. моментом начала изменения выходного сигнала.
· Запаздывание— время, через которое показания датчика первый раз достигают 50 % установившегося значения. В литературе встречаются и другие определения запаздывания.
· Время нарастания— время, за которое выходной сигнал увеличивается от 10 до 90 % установившегося значения. Другое определение времени нарастания — величина, обратная наклону кривой реакции датчика на скачок измеряемой величины в момент достижения 50 % от установившегося значения, умноженная на установившееся значение. Иногда используются другие определения. Малое время нарастания всегда указывает на быструю реакцию.
· Время достижения первого максимума— время достижения первого максимума выходного сигнала (перерегулирования).
· Время переходного процесса, время установления— время, начиная с которого отклонение выхода датчика от установившегося значения становится меньше заданной величины (например, ± 5 %).
· Относительное перерегулирование — разность между максимальным и установившимся значениями, отнесенная к установившемуся значению (в процентах).
· Статическая ошибка — отклонение выходной величины датчика от истинного значения или смещение. Может быть устранена калибровкой датчика.
В реальных условиях некоторые требования к датчикам всегда противоречат друг другу, поэтому все параметры нельзя минимизировать одновременно.
Статические характеристики датчиков
Статические характеристики датчика показывают, насколько корректно выход датчика отражает измеряемую величину спустя некоторое время после ее изменения, когда выходной сигнал установился на новое значение. Важными статическими параметрами являются: чувствительность, разрешающая способность или разрешение, линейность, дрейф нуля и полный дрейф, рабочий диапазон, повторяемость и воспроизводимость результата.
• Чувствительностьдатчика определяется как отношение величины
выходного сигнала к единичной входной величине (для тонких измерительных технологий определение чувствительности может быть более сложным).
•Разрешение — это наименьшее изменение измеряемой величины, которое может быть зафиксировано и точно показано датчиком.
•Линейностьне описывается аналитически, а определяется исходя из
градуировочной кривой датчика. Статическая градуировочная кривая показывает зависимость выходного сигнала от входного при стационарных условиях. Близость этой кривой к прямой линии и определяет степень линейности. Максимальное отклонение от линейной зависимости выражается в процентах.
•Статическое усилениеили усиление по постоянному току
— это коэффициент усиления датчика на очень низких частотах. Большой коэффициент усиления соответствует высокой чувствительности измерительного устройства.
•Дрейфопределяется как отклонение показаний датчика, когда измеряемая
величина остается постоянной в течение длительного времени. Величина дрейфа
может определяться при нулевом, максимальном или некотором промежуточном значении входного сигнала. При проверке дрейфа нуля измеряемая величина поддерживается на нулевом уровне или уровне, который соответствует нулевому выходному сигналу, а проверка дрейфа на максимуме выполняется при значении измеряемой величины, соответствующем верхнему пределу рабочего диапазона » датчика. Дрейф датчика вызывается нестабильностью усилителя, изменением окружающих условий (например, температуры, давления, влажности или уровня вибраций), параметров электроснабжения или самого датчика (старение, выработка ресурса, нелинейность и т. д.).
• Рабочий диапазондатчика определяется допустимыми верхним
и нижним пределами значения входной величины или уровня выходного сигнала.
• Повторяемостьхарактеризуется как отклонение между несколькими
последовательными измерениями при заданном значении измеряемой величины в одинаковых условиях, в частности приближение к заданному значению должно происходить всегда и либо как нарастание, либо как убывание. Измерения должны быть выполнены за такой промежуток времени, чтобы не проявлялось влияние дрейфа. Повторяемость обычно выражается в процентах от рабочего диапазона.
• Воспроизводимостьаналогична повторяемости, но требует большего интервала между измерениями. Между проверками на воспроизводимость датчик должен использоваться по назначению и, более того, может быть подвергнут калибровке. Воспроизводимость задается в виде процентов от рабочего диапазона, отнесенных к единице времени (например, месяцу).
Источник