Датчики
первичные преобразователи, микросхемы, готовые модули
Датчики давления компании Smartec
Принцип работы
Датчики давления основаны на принципе изгиба мембраны, вызванном давлением жидкости или газа. На мембрану нанесен очень тонкий проводящий экранированный слой, который повторяет изгибы мембраны. Этот прогиб можно измерить двумя разными способами:
- Проводящий (и резистивный) слой на мембране и опорный слой в корпусе датчика образуют конденсатор, деформация его обкладок вызывает изменение емкости, которое может быть измерено
- Сопротивление проводящих слоев изменяется при изгибе мембраны. Специальная механическая компоновка из четырех резистивных структур образовывает устойчивый мост Уитстона, сопоставимый с классическими тензометрическими датчиками
На практике широко используются оба способа измерения давления. Линейка датчиков давления Smartec основана на резистивной структуре, экранированной на мембране.


Принцип действия датчика давления
Емкостное измерение на основе тензометрического резистора на изгибающейся мембране
Изгиб мембраны (а также слоя) очень мал ( Такое отверстие, соединяющее подмембранный объем с атмосферой, обычно называют вентиляционным.

Принцип работы датчика относительного давления
Единственным интерфейсом между «внешним миром» и находящейся под давлением средой является мембрана. Если эта мембрана повреждена (например, из-за ударного давления), сторона под давлением непосредственно соединяется с вентиляционным отверстием, начинается выброс газа или жидкости, что может привести к опасной ситуации. Для измерения давления опасных газов этот тип датчика не используется, вместо этого применяют датчики абсолютного типа.
Все датчики относительного давления имеют вентиляционное отверстие, которое соединяет одну сторону мембраны с атмосферой. Если это отверстие закрыто или забито из-за загрязнения, могут возникнуть ошибки считывания. Если этот тип датчиков установлен в прочный корпус, вентиляционное отверстие должно всегда оставаться открытым.
Типичное применение датчиков такого типа – измерение давления в шинах.
Датчики абсолютного давления
Данный тип не имеет вентиляционного отверстия, а в подмембранном объеме создан вакуум. На рисунке показан принцип датчика абсолютного давления.

Принцип работы датчика абсолютного давления
Очень сложно создать такую «камеру» с абсолютным вакуумом (фактически она и не существует). Однако давление в вакуумной контрольной камере датчиков Smartec очень низкое (25.10 -3 торр или 5.10 -4 PSI).
Для предотвращения возмущающих эффектов от различий в температурах в «почти» вакуумной камере, вакуум должен быть высоким. При нагревании давление в вакуумной камере будет увеличиваться.
Такие датчики подходят для использования во взрывоопасных зонах. Корпус может быть полностью закрыт и установлен, например, в резервуар под давлением. На случай образования трещин в мембране (например, из-за ударного давления), к среде подключена только вакуумная камера. При повреждении датчика не возникнет опасной ситуации. Особым типом датчика абсолютного давления является барометрический датчик. Этот датчик можно рассматривать как абсолютный с ограниченным диапазоном. В принципе, этот диапазон составляет от примерно 1 до 0 Бар. Но для большего разрешения барометрические датчики рассчитаны на диапазон 1 — 0.8 Бар и обычно используются для измерения атмосферного давления.
Данный тип датчиков используется, например, для измерения давления в газобаллонном оборудовании топливных систем автомобилей.
Датчики дифференциального давления
Дифференциальный датчик имеет входы на каждую сторону мембраны, один для положительного давления, а другой для отрицательного. Изгиб мембраны связан с разницей давлений на каждой стороне. На рисунке показан принцип работы датчика дифференциального давления.

Принцип работы датчика дифференциального давления.
Типы выходного сигнала
Только датчики Smartec с мостовым выходом необходимо компенсировать пользователю. В другие версии с аналоговым и цифровым выходом компенсация встраивается на производстве. Температурная компенсация управляется с помощью встроенного сигнального процессора, поэтому нет необходимости встраивать в решение внешнюю компенсацию.
Мостовой выходной сигнал
Выход моста Уитстона имеет определенное значение в случае отсутствия давления или в случае отсутствия разницы в давлении по обеим сторонам мембраны. Это значение называется смещением (offset). Диапазон давлений (от минимального до максимального), который может использоваться датчиком, называется рабочим.
Мост Уитстона не только чувствителен к изгибу мембраны, но и к изменениям температуры. Это означает, что для точного измерения необходимо компенсировать температурные эффекты для смещения и сдвига рабочего диапазона (при наличии давления). Поэтому указывается изменение смещения на изменение температуры, а также температурные коэффициенты рабочего диапазона. Если требуется более низкая точность, выходное напряжение моста может использоваться без компенсации.
Аналоговый выходной сигнал
Датчики давления Smartec с аналоговым выходом имеют встроенную термокомпенсацию. Это означает, что датчики с аналоговым выходом очень точны и имеют стабильное смещение. Из-за обработки сигнала внутри устройства происходит некоторая задержка между физическим изменением давления и изменением выходного сигнала. Обычно эта задержка находится в диапазоне от 1 до 2 мс.
В аналоговой версии датчика дифференциального давления требуется дополнительное определение в месте, где давление на оба порта одинаковое. Разность давлений равна нулю. В этом конкретном случае выходное напряжение (смещение) может находиться в «среднем» (halfway Gnd и Vcc), или выходное напряжение смещения может быть равно нулю (уровень GND). Первая вариант называется дифференциальным, а второй называется единичным. Это означает, что дифференциальное давление может быть измерено только в одном направлении.
Цифровой выходной сигнал
Разрешение датчиков данного типа – 14 бит. В терминах передачи данных это означает, что есть два слова по 8 бит каждое. Верхние два бита наивысшего байта данных не используются и всегда равны нулю. Необходимо помнить, что точность датчиков ограничена физической структурой элемента и оцифровка (14 бит), никогда не сможет улучшить аналоговую точность датчика.
Важные понятия
Абсолютное давление — это давление относительно вакуума.
Атмосферное давление – это внешнее давление относительно абсолютного вакуума. Такое давление зависит от географического положения, высоты и погодных условий. Также называется барометрическим давлением.
Относительное давление – это давление относительно атмосферного давления.
Дифференциальное давление – разность давлений между двумя точками.
Смещение – разница между выходным сигналом при текущем и нулевом значении давления.
Линия наилучшего соответствия – математически полученная прямая линия лучше всего подходящая для мультиизмерения определенных уровней давления. Из каждой точки давления выходное значение усредняется. Прямая берется по минимальной квадратичной ошибке.
Нулевое смещение (рабочая точка) – это выходное значение при давлении 0 psi (вакуум) для датчика абсолютного давления, для относительных нулевое смещение – это выходное значение, когда измеряемое давление равно атмосферному, а для дифференциальных датчиков, когда давления с обоих портов равны между собой.
Рабочий диапазон – это разность между максимальным и минимальным значением давления.
Точность — отклонение между лучшей прямой линией и кривой полученной на основе реальных тестов. В точность также включены все погрешности. Выражается в процентах от полной шкалы (FSO).
Ратиометрический сигнал — означает, что выход датчика (аналог) связан с напряжением питания. Это означает, что если Vcc падает на 10% выходное напряжение также падает на 10%.
Время отклика – время необходимое для установления величины равной 95% от реальной.
- www.efo.ru Дистрибуция электронных компонентов
- www.powel.ru Источники питания
- www.korpusa.ru Конструктивы и корпуса РЭА
- www.wless.ru Беспроводные технологии
- www.altera.ru Микросхемы Altera
- www.efo-power.ru Силовая электроника
- www.efo-electro.ru Электротехническая продукция
- www.efometry.ru Контрольно-измерительные приборы
- www.golledge.ru Кварцевые резонаторы и генераторы Golledge
- www.sound-power.ru Профессиональные усилители класса D
- www.infiber.ru Волоконно-оптические компоненты в промышленности
- www.mymcu.ru Микроконтроллеры
- www.efomation.ru Компоненты для промавтоматики
- www.latticesemi.ru Продукция Lattice Semiconductor
© 2016 — 2021 All Right Reserved. EFO Ltd. При использовании материалов ссылка на источник обязательна.
Источник
Аналоговые датчики: применение, способы подключения к контроллеру
 В процессе автоматизации технологических процессов для управления механизмами и агрегатами приходится сталкиваться с измерениями различных физических величин. Это может быть температура, давление и расход жидкости или газа, частота вращения, сила света информация о положении частей механизмов и многое другое. Эта информация получается с помощью датчиков. Вот, сначала о положении частей механизмов.
В процессе автоматизации технологических процессов для управления механизмами и агрегатами приходится сталкиваться с измерениями различных физических величин. Это может быть температура, давление и расход жидкости или газа, частота вращения, сила света информация о положении частей механизмов и многое другое. Эта информация получается с помощью датчиков. Вот, сначала о положении частей механизмов.
Дискретные датчики
Самый простой датчик – обычный механический контакт: дверь открыли – контакт разомкнулся, закрыли – замкнулся. Такой нехитрый датчик, равно как и приведенный алгоритм работы, часто применяется в охранных сигнализациях. Для механизма с поступательным движением, который имеет два положения, например водопроводная задвижка, понадобится уже два контакта: замкнулся один контакт – задвижка закрыта, замкнулся другой – закрыта.
Более сложный алгоритм поступательного движения имеет механизм закрытия прессформы термопласт автомата. Изначально прессформа открыта, это исходное положение. В этом положении из прессформы извлекаются готовые изделия. Далее рабочий закрывает защитное ограждение и прессформа начинает закрываться, начинается новый рабочий цикл.
Расстояние между половинами прессформы достаточно велико. Поэтому сначала прессформа движется быстро, а на некотором расстоянии до смыкания половин, срабатывает концевик, скорость движения значительно уменьшается и прессформа плавно закрывается.
Такой алгоритм позволяет избежать удара при смыкании прессформы, иначе ее просто можно расколотить на мелкие кусочки. Такое же изменение скорости происходит и при открывании прессформы. Здесь уже двумя контактными датчиками не обойтись.
Таким образом, датчики на основе контакта являются дискретными или бинарными, имеют два положения, замкнут – разомкнут или 1 и 0. Другими словами можно сказать, что событие произошло или нет. В приведенном выше примере, контактами «улавливаются» несколько точек: начало движения, точка снижения скорости, конец движения.
В геометрии точка не имеет никаких размеров, просто точка и все. Она может либо быть (на листе бумаги, в траектории движения, как в нашем случае) или ее попросту нет. Поэтому для обнаружения точек применяются именно дискретные датчики. Может быть сравнение с точкой здесь не очень уместно, ведь в практических целях пользуются величиной точности срабатывания дискретного датчика, а точность эта намного больше геометрической точки.
Но сам по себе механический контакт вещь ненадежная. Поэтому везде, где это возможно, механические контакты заменяются бесконтактными датчиками. Самый простой вариант это герконы: магнит приблизился, контакт замкнулся. Точность срабатывания геркона оставляет желать лучшего, применять такие датчики как раз только для определения положения дверей.
Более сложным и точным вариантом следует считать различные бесконтактные датчики. Если металлический флажок вошел в прорезь, то датчик сработал. В качестве примера таких датчиков можно привести датчики БВК (Бесконтактный Выключатель Конечный) различных серий. Точность срабатывания (дифференциал хода) таких датчиков 3 миллиметра.

Рисунок 1. Датчик серии БВК
Напряжение питания датчиков БВК 24В, ток нагрузки 200мА, что вполне достаточно для подключения промежуточных реле для дальнейшего согласования со схемой управления. Именно так используются датчики БВК в различном оборудовании.
Кроме датчиков БВК применяются также датчики типов БТП, КВП, ПИП, КВД, ПИЩ. Каждая серия имеет несколько типов датчиков, обозначаемых цифрами, например, БТП-101, БТП-102, БТП-103, БТП-211.
Все упомянутые датчики являются бесконтактными дискретными, их основное назначение определение положения частей механизмов и агрегатов. Естественно, что этих датчиков намного больше, обо всех в одной статье не написать. Еще более распространены и до сих пор находят широкое применение различные контактные датчики.
Применение аналоговых датчиков
Кроме дискретных датчиков в системах автоматизации широкое применение находят аналоговые датчики. Их назначение – получение информации о различных физических величинах, причем не, просто так вообще, а в реальном масштабе времени. Точнее преобразование физической величины (давление, температура, освещенность, расход, напряжение, ток) в электрический сигнал пригодный для передачи по линиям связи в контроллер и дальнейшая его обработка.
Аналоговые датчики располагаются, как правило, достаточно далеко от контроллера, отчего часто их называют полевыми устройствами. Этот термин часто применяется в технической литературе.
Аналоговый датчик, как правило, состоит из нескольких частей. Самая главная часть это чувствительный элемент – сенсор. Его назначение перевести измеряемую величину в электрический сигнал. Но сигнал, получаемый от сенсора, как правило, невелик. Для получения сигнала, пригодного для усиления, сенсор чаще всего включается в мостовую схему – мостик Уитстона.
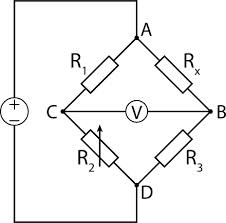
Рисунок 2. Мостик Уитстона
Изначальное назначение мостовой схемы — точное измерение сопротивления. К диагонали моста AD подключается источник постоянного тока. В другую диагональ подключен чувствительный гальванометр со средней точкой, с нулем в середине шкалы. Для измерения сопротивления резистора Rx вращением подстроечного резистора R2 следует добиться равновесия моста, установить стрелку гальванометра на нулевое значение.
Отклонение стрелки прибора в ту или иную сторону позволяет определить направление вращения резистора R2. Величина измеряемого сопротивления определяется по шкале, совмещенной с ручкой резистора R2. Условием равновесия моста является равенство соотношений R1/R2 и Rx/R3. В этом случае между точками BC получается нулевая разность потенциалов, и ток через гальванометр V не протекает.
Сопротивление резисторов R1 и R3 подобрано очень точно, их разброс должен быть минимален. Только в этом случае даже небольшой разбаланс моста вызывает достаточно заметное изменение напряжения диагонали BC. Именно это свойство моста используется для подключения чувствительных элементов (сенсоров) различных аналоговых датчиков. Ну, а дальше все просто, дело техники.
Для использования сигнала, полученного с сенсора, требуется его дальнейшая обработка, — усиление и преобразование в выходной сигнал, пригодный для передачи и обработки схемой управления — контроллером. Чаще всего выходным сигналом аналоговых датчиков является ток (аналоговая токовая петля), реже напряжение.
Почему именно ток? Дело в том, что выходные каскады аналоговых датчиков построены на базе источников тока. Это позволяет избавиться от влияния на выходной сигнал сопротивления соединительных линий, пользоваться соединительными линиями большой длины.
Дальнейшее преобразование достаточно просто. Токовый сигнал преобразуется в напряжение, для чего достаточно ток пропустить через резистор известного сопротивления. Падение напряжения на измерительном резисторе получается по закону Ома U=I*R.
Например, для тока 10 мА на резисторе сопротивлением 100Ом получится напряжение 10*100=1000мВ, аж прямо целый 1 вольт! При этом выходной ток датчика не зависит от сопротивления соединительных проводов. В разумных, конечно, пределах.
Подключение аналоговых датчиков
Полученное на измерительном резисторе напряжение легко преобразовать в цифровой вид, пригодный для ввода в контроллер. Преобразование выполняется с помощью аналого-цифровых преобразователей АЦП.
Цифровые данные в контроллер передаются последовательным или параллельным кодом. Все зависит от конкретной схемы включения. Упрощенная схема подключения аналогового датчика показана на рисунке 3.

Рисунок 3. Подключение аналогового датчика (чтобы увеличить нажмите на картинку)
К контроллеру подключаются исполнительные механизмы, либо сам контроллер подключается к компьютеру, входящему в систему автоматизации.
Естественно, что аналоговые датчики имеют законченную конструкцию, одним из элементов которой является корпус с присоединительными элементами. В качестве примера на рисунке 4 показан внешний вид датчика избыточного давления типа Зонд-10.

Рисунок 4. Датчик избыточного давления Зонд-10
В нижней части датчика можно видеть присоединительную резьбу для подключения к трубопроводу, а справа под черной крышкой находится разъем для подключения линии связи с контроллером.
Герметизация резьбового соединения производится с помощью шайбы из отожженной меди (входит в комплект поставки датчика), а отнюдь не подмоткой из фум-ленты или льна. Делается это для того, чтобы при установке датчика не деформировать расположенный внутри сенсорный элемент.
Выходные сигналы аналоговых датчиков
Согласно стандартам существует три диапазона токовых сигналов: 0…5мА, 0…20мА и 4…20мА. В чем их отличие, и какие особенности?
Чаще всего зависимость выходного тока прямо пропорциональна измеряемой величине, например, чем выше давление в трубе, тем больше ток на выходе датчика. Хотя иногда применяется инверсное включение: большей величине выходного тока соответствует минимальное значение измеряемой величины на выходе датчика. Все зависит от типа применяемого контроллера. Некоторые датчики имеют даже переключение с прямого на инверсный сигнал.
Выходной сигнал диапазона 0…5мА весьма мал, и поэтому подвержен действию помех. Если сигнал такого датчика колеблется при неизменном значении измеряемого параметра, то есть рекомендации параллельно выходу датчика установить конденсатор емкостью 0.1…1мкФ. Более устойчивым является токовый сигнал в диапазоне 0…20мА.
Но оба этих диапазона нехороши тем, что ноль в начале шкалы не позволяет однозначно определить, что же произошло. Или измеряемый сигнал на самом деле принял нулевой уровень, что в принципе возможно, или просто оборвалась линия связи? Поэтому от использования этих диапазонов стараются, по возможности, отказаться.
Более надежным считается сигнал аналоговых датчиков с выходным током в диапазоне 4…20мА. Помехозащищенность его достаточно высокая, а нижний предел, даже если измеряемый сигнал имеет нулевой уровень, будет 4мА, что позволяет говорить о том, что линия связи не оборвана.
Еще одной хорошей особенностью диапазона 4…20мА является то, что датчики можно подключать всего по двум проводам, поскольку именно таким током питается сам датчик. Это его ток потребления и одновременно измерительный сигнал.
Источник питания датчиков диапазона 4…20мА включается, как показано на рисунке 5. При этом датчики Зонд-10, как и многие другие, по паспорту имеют широкий диапазон напряжения питания 10…38В, хотя чаще всего применяются стабилизированные источники с напряжением 24В.
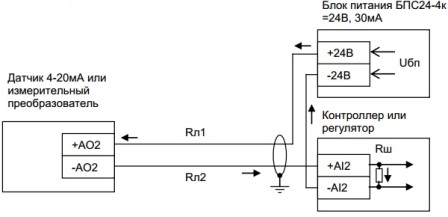
Рисунок 5. Подключение аналогового датчика с внешним источником питания
На этой схеме присутствуют следующие элементы и обозначения. Rш – резистор измерительного шунта, Rл1 и Rл2 – сопротивления линий связи. Для повышения точности измерения в качестве Rш должен использоваться прецизионный измерительный резистор. Прохождение тока от источника питания показано стрелками.
Нетрудно видеть, что выходной ток источника питания проходит с клеммы +24В, через линию Rл1 достигает клеммы датчика +AO2, проходит через датчик и через выходной контакт датчика — AO2, соединительную линию Rл2, резистор Rш возвращается на клемму источника питания -24В. Все, цепь замкнулась, ток течет.
В случае, если контроллер содержит источник питания 24В, то подключение датчика или измерительного преобразователя возможно по схеме, показанной на рисунке 6.
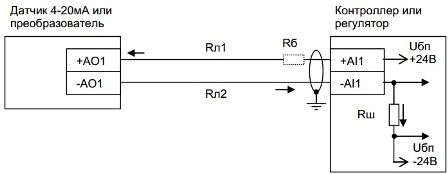
Рисунок 6. Подключение аналогового датчика к контроллеру с внутренним источником питания
На этой схеме показан еще один элемент – балластный резистор Rб. Его назначение защита измерительного резистора при замыкании линии связи или неисправности аналогового датчика. Установка резистора Rб необязательна, хотя и желательна.
Кроме различных датчиков токовый выход имеют также измерительные преобразователи, которые в системах автоматизации используются достаточно часто.
Измерительный преобразователь – устройство для преобразования уровней напряжения, например, 220В или тока в несколько десятков или сотен ампер в токовый сигнал 4…20мА. Здесь просто происходит преобразование уровня электрического сигнала, а не представление некоторой физической величины (скорость, расход, давление) в электрическом виде.
Но единственным датчиком дело, как правило, не обходится. Одними из самых популярных измерения являются измерения температуры и давления. Количество таких точек на современных производствах может достигать нескольких десятков тысяч. Соответственно и количество датчиков тоже велико. Поэтому к одному контроллеру чаще всего подключается сразу несколько аналоговых датчиков. Конечно же, не сразу несколько тысяч, хорошо, если десяток – другой. Такое подключение показано на рисунке 7.
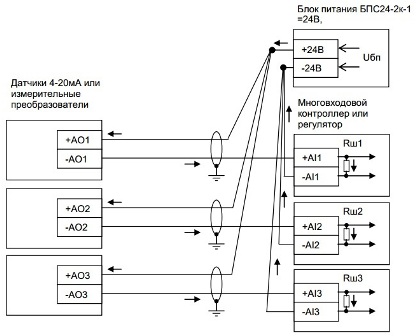
Рисунок 7. Подключение нескольких аналоговых датчиков к контроллеру
На этом рисунке показано, как из токового сигнала получается напряжение, пригодное для преобразования в цифровой код. Если таких сигналов несколько, то обрабатываются они не все сразу, а разделяются по времени, мультиплексируются, в противном случае на каждый канал пришлось бы ставить отдельный АЦП.
Для этой цели контроллер имеет схему коммутации каналов. Функциональная схема коммутатора показана на рисунке 8.
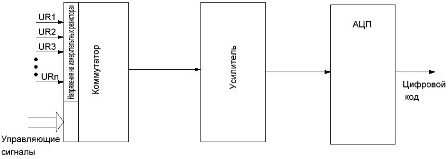
Рисунок 8. Коммутатор каналов аналоговых датчиков (картинка кликабельна)
Сигналы токовой петли, преобразованные в напряжение на измерительном резисторе (UR1…URn) поступают на вход аналогового коммутатора. Управляющие сигналы поочередно пропускают на выход один из сигналов UR1…URn, которые усиливаются усилителем, и поочередно поступают на вход АЦП. Преобразованное в цифровой код напряжение поступает в контроллер.
Схема, конечно, очень упрощенная, но принцип мультиплексирования в ней рассмотреть вполне возможно. Примерно так построен модуль ввода аналоговых сигналов контроллеров МСТС (микропроцессорная система технических средств) выпускавшихся смоленским ПК «Пролог». Внешний вид контроллера МСТС показан на рисунке 9.

Рисунок 9. Контроллер МСТС
Выпуск таких контроллеров давно уже прекращен, хотя в некоторых местах, далеко не лучших, эти контроллеры служат до сих пор. На смену этим музейным экспонатам приходят контроллеры новых моделей, в основном импортного (китайского) производства.
Для подключения токовых датчиков 4…20мА рекомендуется использовать двухпроводный экранированный кабель с сечением жил не менее 0,5 мм2.
Если контроллер смонтирован в металлическом шкафу, то экранирующие оплетки рекомендуется подключать к точке заземления шкафа. Длина соединительных линий может достигать двух с лишним километров, что рассчитывается по соответствующим формулам. Считать здесь ничего не будем, но поверьте, что это так.
Новые датчики, новые контроллеры
С приходом новых контроллеров появились и новые аналоговые датчики, работающие по протоколу HART (Highway Addressable Remote Transducer), что переводится как «Измерительный преобразователь, адресуемый дистанционно через магистраль».
Выходной сигнал датчика (полевого устройства) представляет собой аналоговый токовый сигнал диапазона 4…20мА, на который накладывается частотно модулированный (FSK — Frequency Shift Keying) сигнал цифровой связи.
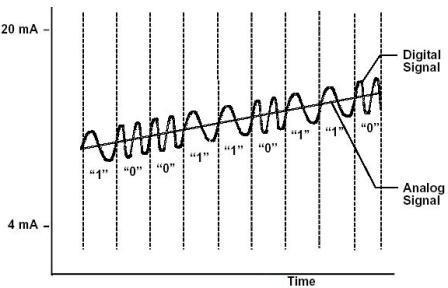
Рисунок 10. Выходной сигнал аналогового датчика по протоколу HART
На рисунке показан аналоговый сигнал, а вокруг него, как змея, извивается синусоида. Это и есть частотно – модулированный сигнал. Но это еще вовсе не цифровой сигнал, его еще предстоит распознать. На рисунке заметно, что частота синусоиды при передаче логического нуля выше (2,2КГц), чем при передаче единицы (1,2КГц). Передача этих сигналов осуществляется током амплитудой ±0,5мА синусоидальной формы.
Известно, что среднее значение синусоидального сигнала равно нулю, поэтому, на выходной ток датчика 4…20мА передача цифровой информации влияния не оказывает. Такой режим используется при настройке датчиков.
Связь по протоколу HART осуществляется двумя способами. В первом случае, стандартном, по двухпроводной линии могут обмениваться информацией только два устройства, при этом выходной аналоговый сигнал 4…20мА зависит от измеряемой величины. Такой режим применяется при настройке полевых устройств (датчиков).
Во втором случае к двухпроводной линии может быть подключено до 15 датчиков, количество которых определяется параметрами линии связи и мощностью блока питания. Это режим многоточечной связи. В этом режиме каждый датчик имеет свой адрес в диапазоне 1…15, по которому к нему обращается устройство управления.
Датчик с адресом 0 от линии связи отключен. Обмен данными между датчиком и устройством управления в многоточечном режиме осуществляется только частотным сигналом. Токовый сигнал датчика зафиксирован на необходимом уровне и не изменяется.
Под данными в случае многоточечной связи подразумеваются не только собственно результаты измерений контролируемого параметра, но еще и целый набор всевозможной служебной информации.
В первую очередь это адреса датчиков, команды управления, параметры настройки. И вся эта информация передается по двухпроводным линиям связи. А нельзя ли избавиться и от них? Правда, делать это надо осторожно, лишь в тех случаях, когда беспроводное соединение не сможет повлиять на безопасность контролируемого процесса.
Оказывается, избавиться от проводов можно. Уже в 2007 году был опубликован Стандарт WirelessHART, средой передачи является нелицензируемая частота 2,4ГГц, на которой работают многие компьютерные беспроводные устройства, в том числе и беспроводные локальные сети. Поэтому и WirelessHART-устройства можно использовать без всяких ограничений. На рисунке 11 показана беспроводная сеть WirelessHART.
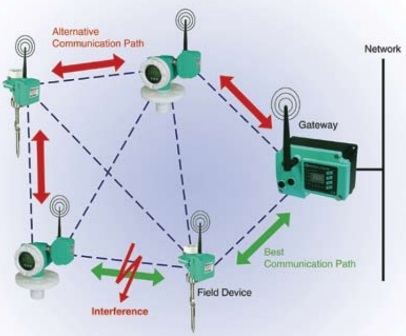
Рисунок 11. Беспроводная сеть WirelessHART
Вот такие технологии пришли на смену старой аналоговой токовой петле. Но и она свои позиции не сдает, широко применяется везде, где это возможно.
Источник