Цифровой датчик линии
Цифровой датчик линии призван отличать тёмную поверхность от светлой.

Разместите датчик на нижней поверхности мобильной платформы, чтобы научить вашего робота двигаться вдоль линии, не выезжать за пределы территории или не сваливаться с края стола.
Пример использования с Arduino
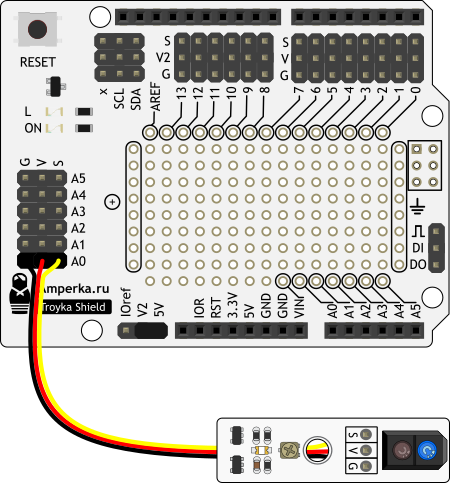
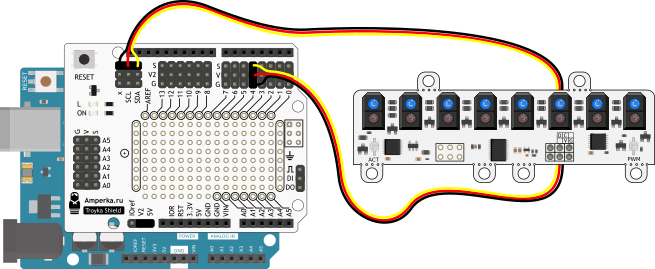
Проверим датчик в действии с платформами Arduino. На выходе сенсора цифровой сигнал. Для быстрого и удобного подключения используйте Troyka Shield.
Схема устройства
Код программы
После загрузки скетча — откройте монитор Serial-порта. Проведите датчиком сначала над столом, а потом за краем стола. При выходе за край стола на мониторе должно возникнуть предупреждение.
Видеообзор
Элементы платы
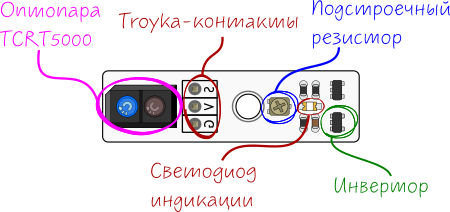
Troyka-контакты
Датчик подключается к управляющей электронике по трём проводам.
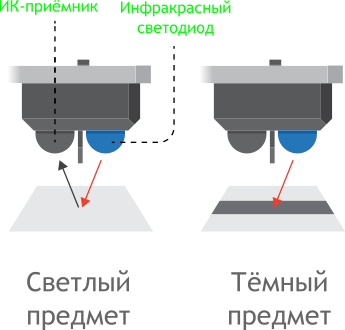
Оптопара TCRT5000
Оптопара TCRT5000 — это собранные в одном корпусе светоиод (синий на рисунке) и фототранзистор n-p-n типа (чёрный на рисунке). Светодиод излучает в инфракрасном диапазоне на длине волны 950 нм. Свет отражается от поверхности и попадает на фототранзистор. 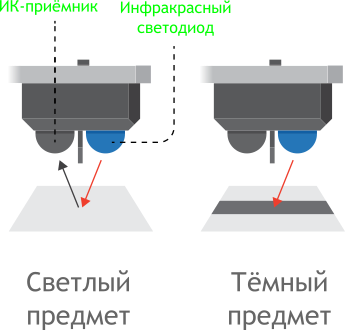
Нужно иметь ввиду, что показания датчика также зависят от расстояния до поверхности. Когда датчик слишком низко, перегородка между диодом и фототранзистором оптопары мешает транзистору принимать отраженный свет. Когда датчик слишком высоко, отраженный свет рассеивается и не доходит до датчика. В обоих случаях датчик выдаст 0.
Инвертор
На борту цифрового датчика расположен инвертирующий триггер Шмитта. При низком напряжении на фототранзисторе — на выходе датчика единица, при высоком — ноль.
Переменный резистор
Переменный резистор позволяет настраивать датчик линии на различные оттенки серого. Если повернуть ручку резистора до упора против часовой стрелки (максимальное сопротивление), то датчик будет выдавать логический ноль над поверхностью светлого оттенка серого. Если повернуть ручку до упора по часовой стрелке (минимальное сопротивление) то датчик будет реагировать только на самые тёмные оттенки. Варьируя сопротивление, вы можете настроить датчик на нужный вам оттенок.
Сигнальный светодиод
Сигнальный светодиод загорается, когда датчик находится над светлой (по его мнению) поверхностью. Наличие диода позволяет более точно откалибровать датчик. Оттенок серого, над которым он загорается в зависимости от настройки можно считать реперной точкой.
Источник
Восьмиканальный датчик линии Octoliner v1
Езда по линии — самое зрелищное и азартное соревнование по робототехнике. Следуя по чёрной линии, робот должен быстрее всех добраться до финиша. В этом ему помогает датчик линии: при помощи оптических сенсоров робот «видит» чёрную линию и следует по ней. Чем точнее датчик, тем быстрее робот преодолеет дистанцию и придёт к финишу.
Установите на «Робоняшу» целую сборку из датчиков линии, и ваш робот станет чемпионом в этом виде соревнований. Ни одна линия не ускользнёт от его восьмиканального зрения.
Видеообзор
Как это работает
На борту модуля расположено восемь датчиков линии. Кроме чёрного и белого цвета, каждый сенсор способен распознать 4096 оттенков серого. Благодаря такой чувствительности робот лучше определяет границу перехода от линии к фону и быстрее реагирует на повороты.
Сенсоры линии подключены к отдельному 32-разрядному микроконтроллеру STM32F030F4P6 с вычислительным ядром ARM Cortex M0. Контроллер считывает данные с восьми датчиков линии и передаёт их управляющей платформе по интерфейсу I²C/TWI. Адрес модуля по умолчанию 0x42 , но его можно изменить, если захотите подключить несколько модулей.
Интенсивность излучения и чувствительность фотоприёмников можно программно регулировать.
Примеры работы для Arduino
Подключение датчика
К платформе Arduino сенсорный модуль удобнее подключать через плату расширения: например, через Troyka Shield.
При помощи трёхпроводных шлейфов подключите модуль к питанию V и G и к пинам шины I²C — SDA и SCL .
Получение данных с датчиков линии
Для запуска примеров скачайте и установите библиотеку Octoliner.
Попробуем получить значения с датчиков сборки и вывести полученные значения на монитор serial-порта. Для этого создадим объект для работы с датчиком, выставим чувствительность фотоприёмников и настроим яркость свечения инфракрасных светодиодов.
Поиск линии
Теперь научим датчики определять нахождение линии. Будем использовать диапазон от –1 до 1:
Для плавной езды по линии рекомендуем использовать сборку датчиков совместно с ПИД-регулятором.
Примеры работы для Espruino
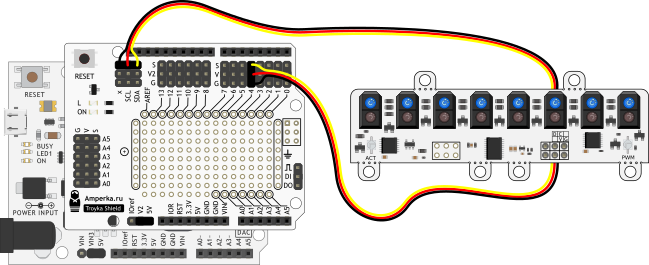
Схема устройства
К платформе Iskra JS сенсорный модуль удобнее подключать через плату расширения: например, через Troyka Shield.
При помощи трёхпроводных шлейфов подключите модуль к питанию V и G и к пинам шины I²C — SDA и SCL .
Получение данных с датчиков линии
Напишем программу, которая поможет получить значения с датчиков сборки и вывести полученные значения на консоль. Для этого подключим модуль работы со сборкой датчиков, выставим чувствительность фотоприёмников и настроим яркость свечения инфракрасных светодиодов.
Поиск линии
Теперь научим датчики определять нахождение линии. Будем использовать диапазон от –1 до 1:
Для плавной езды по линии рекомендуем использовать сборку датчиков совместно с ПИД-регулятором.
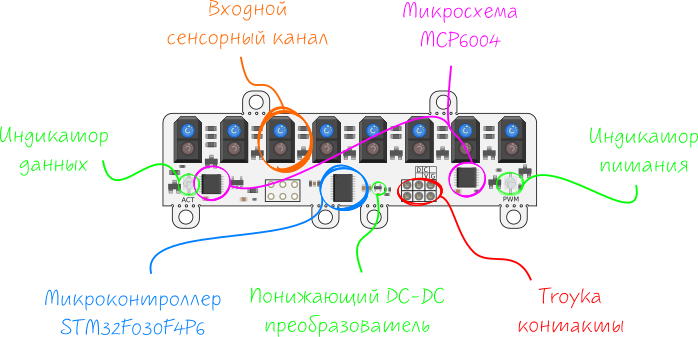
Элементы платы
Плата крепится к роботу при помощи шести ушек, которые сделаны под размер винтов М3.
Микроконтроллер STM32F030F4P6
Мозг сенсорной сборки — мощный 32-разрядный микроконтроллер STM32F030F4P6 с вычислительным ядром ARM Cortex M0. Контроллер считывает данные с восьми датчиков линии и передаёт управляющей платформе по интерфейсу I²C/TWI.
Микросхема MCP6004
На борту модуля расположены два четырёхканальных операционных усилителя MCP6004, при помощи которых можно отрегулировать чувствительность сразу восьми сенсоров.
Понижающий DC-DC
Преобразователь NCP582LSQ33 с выходом 3,3 В обеспечивает питание логической части модуля. Максимальный выходной ток 150 мА.
Светодиодная индикация
На плате расположены два светодиода — индикаторы данных и питания.
| Имя светодиода | Назначение |
|---|---|
| ACT | Отвечает за обмен данными между управляющей платформой и сенсорной сборкой. При обмене данными индикатор мигает. |
| PWM | Показывает чувствительность датчиков: чем больше чувствительность, тем ярче горит светодиод. |
Troyka-контакты
На модуле выведен разъём Troyka-контактов:
Входной сенсорный канал
На модуле расположено восемь датчиков линии на оптопаре TCRT5000.
Оптопара TCRT5000 — это светодиод и фототранзистор, собранные в одном корпусе. Светодиод излучает инфракрасный свет, длина волны 950 нм. Световой поток отражается от поверхности и попадает на фототранзистор, где преобразуется в электрический сигнал. Чем светлее поверхность, тем больше отражается света. Чем темнее — тем меньше.
Показания датчика зависят не только от цвета линии, но и от расстояния сенсора до поверхности. Если расстояние менее 3 мм, то перегородка между ИК-излучателем и приёмником мешает транзистору принимать отражённый свет. При расстоянии более 15 мм отражённый свет рассеивается и не доходит до приёмника.
Источник
Робот, ездящий по линии
В данной статье будет описан процесс создания робота, ездящего по линии. Эта задача является классической, идейно простая, она может решаться много раз, и каждый раз вы будете открывать для себя что-то новое. Решение этой этой задачи и реализация полученного решения позволяют приобрести необходимые начальные навыки для дальнейшего совершенствования в робототехнике.
Существует множество подходов для решения задачи следования по линии. Выбор одного из них зависит от конкретной конструкции робота, от количества сенсоров, их расположения относительно колёс и друг друга.
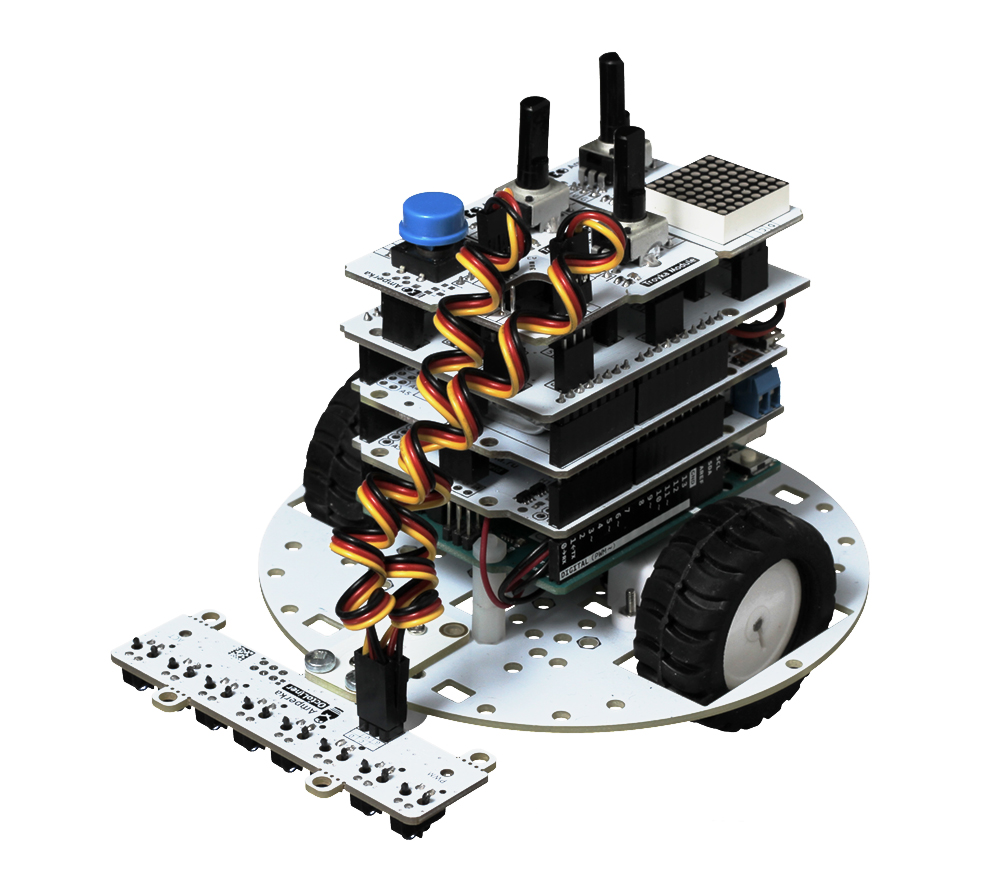
В нашем примере будет собран робот на лёгкой платформе с двумя колёсами и двумя датчиками линии, расположенными на днище робота перед колёсами.
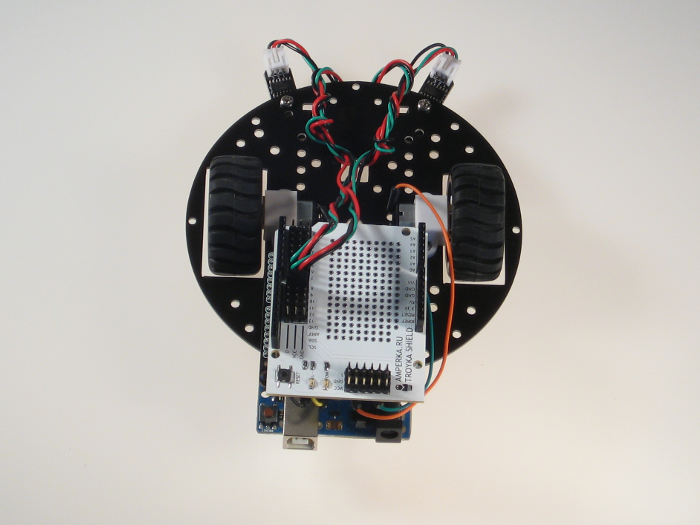
В результате выглядеть он будет так:
Что понадобится
Для нашего примера понадобятся следующие детали:
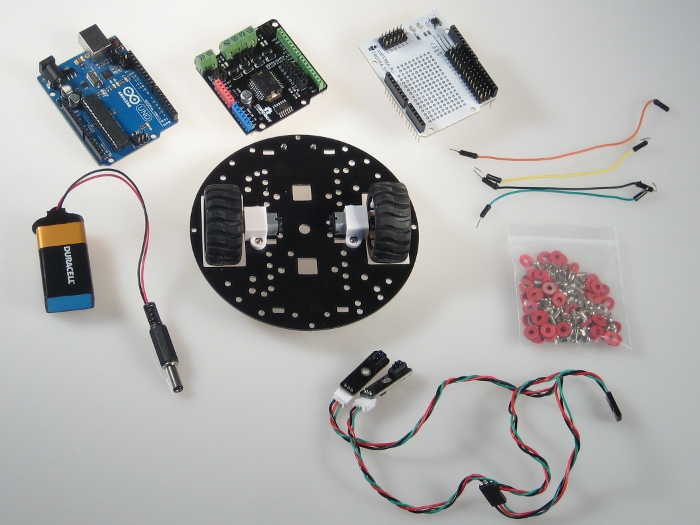
Вообще говоря, лучше было бы использовать NiMH-аккумуляторы: они лучше отдают ток и значительно дольше держат напряжение, но для целей этого проекта одной батарейки на 9 В вполне хватило.
Собираем робота
Сначала соберём робота, установим всю механику и электронику.
Собираем платформу
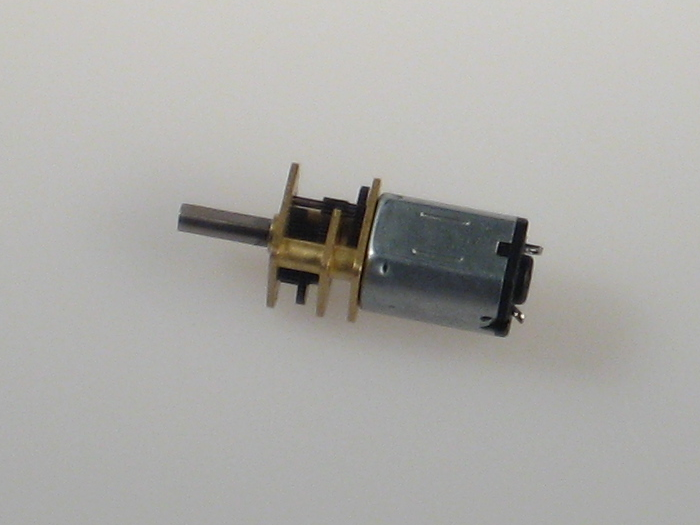
Для начала прикрепим колёса к мотрорам.

Затем с помощью пластиковых П-образных креплений прикручиваем моторчики к платформе. Обратите внимание на взаимное расположение крепления и моторчики: в креплении есть небольшие углубления, так что если всё соединить правильно, то моторчики будут крепко держаться и никуда не выскочат.
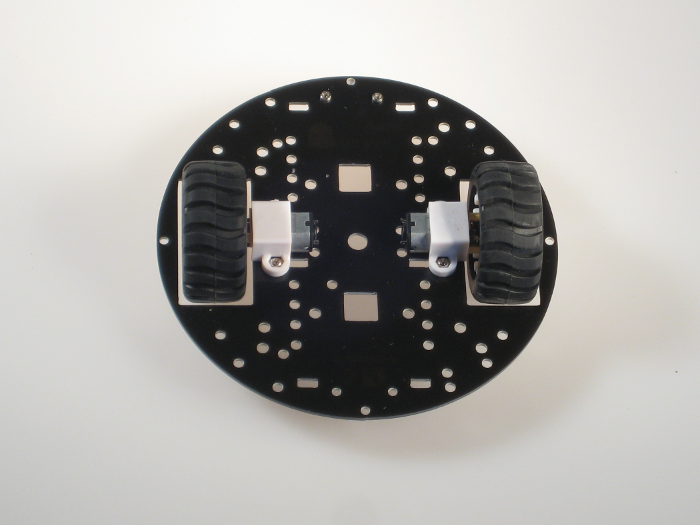
Теперь крепим балансировочный шар.
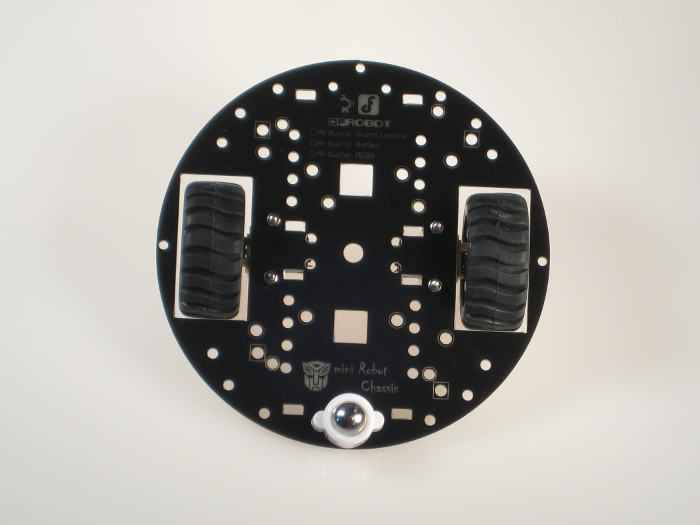
Отлично! Платформа собрана. Если вам кажется, что колёсам отведено слишком мало места и они трутся о платформу, то скорее всего вам нужно посильнее надавить на колёса, чтобы они плотнее сели на вал мотора.
Крепим сенсоры
Закрепим их, как показано на фото:
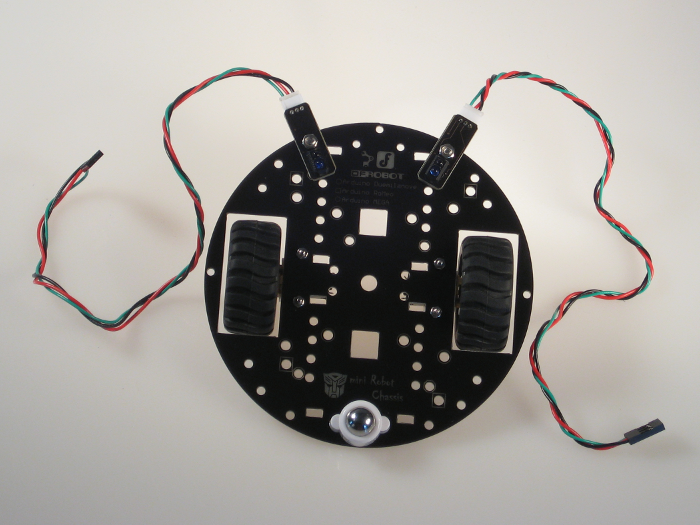
Можно было бы выбрать и другое место. Это могло бы сделать контроль проще или сложнее, а самого робота более или менее эффективным. Оптимальное расположение — вопрос серии экспериментов. Для этого проекта просто был выбран такой способ крепления.
Крепим Arduino
Arduino закрепим с противоположной стороны двумя винтиками и гайками.
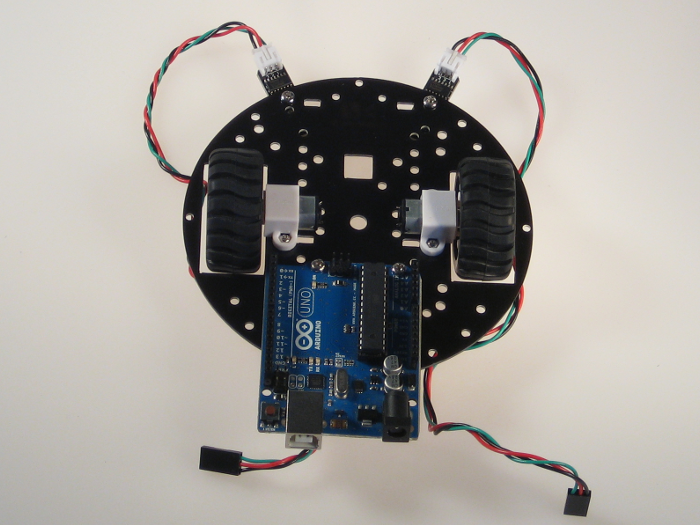
Опять же, можно выбрать и другое место. Например над колёсами, если приподнять Arduino на латунных стойках. Это изменило бы положение центра масс и повлияло бы на эффективность робота в лучшую или худшую сторону.
Крепим Motor Shield и соединительные провода
Установим Motor Shield на Arduino и подсоединим соединительные провода. Обратите внимание, чтобы соотвествовать программному коду из примера ниже, моторчики соединены с Motor Shield так: правый — к клеммам M1 с прямой полярностью (плюс к плюсу), а левый — к M2 с обратной (плюс к минусу).
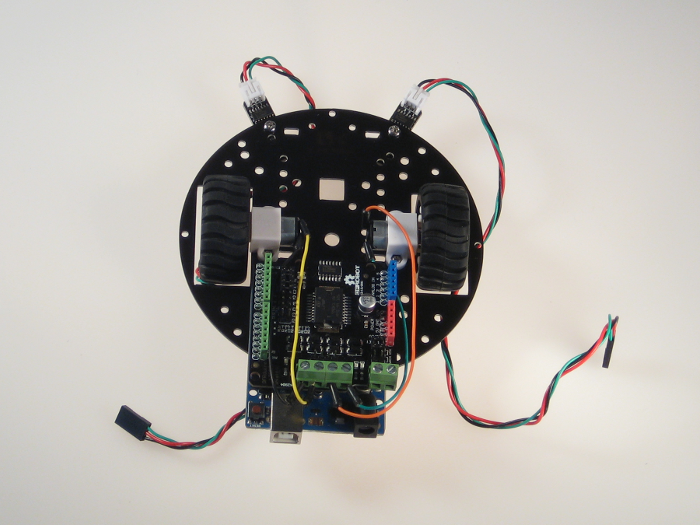
В этом проекте, для экономии времени концы соединительных проводов просто скручены с контактами моторов. При работе «начисто» стоит жёстко припаять провода к моторам.
Крепим Troyka Shield
Присоединяем сверху Troyka Shield и подключаем датчики к 8 и 9 цифровым контактам. В итоге получаем следующую конструкцию:
Программирование
Теперь напишем программу, которая заставит собранную конструкцию двигаться по нарисованной линии. В проекте мы будем использовать чёрную линию, напечатанную на белых листах бумаги.
Основная идея алгоритма
Пусть у нас усть белое поле, и на нём чёрным нарисован трек для нашего робота. Используемые датчики линии выдают логический ноль, когда «видят» чёрное и единицу, когда «видят» белое.
На прямой робот должен пропускать трек между сенсоров, то есть оба сенсора должны показывать единички.
При повороте траектории направо, правый сенсор наезжает на трек и начинает показывать логический ноль. При повороте налево, ноль показывает левый сенсор.
Таким образом получаем простую систему с тремя состояниями:
На вход системы поступает информация с сенсоров. Получаем следующую логику переходов:
| Левый | Правый | Целевое состояние |
|---|---|---|
| 0 | 0 | STATE_FORWARD |
| 0 | 1 | STATE_RIGHT |
| 1 | 0 | STATE_LEFT |
| 1 | 1 | STATE_FORWARD |
Реализация на Arduino
Проблема инертности и её решение
Однако если выставить скорость моторов побольше, мы столкнёмся со следующей проблемой: наш робот будет вылетать с трека, не успевая отреагировать на поворот. Это связано с тем, что наши моторчики не умеют тормозить мгновенно.
В этом легко убедиться поставив следующий эксперимент: с заданной скоростью робот будет двигаться по поверхности, и в некоторый момент будет установлена нулевая скорость и измерен тормозной путь робота. Пусть робот разгоняется по монотонной поверхности и тормозится при фиксировании импровизированной стоп-линии.
Эксперимент проведём для разных скоростей. Код программы для эксперимента таков:
На той поверхности, на которой проводился эксперимент, были получены следующие результаты:
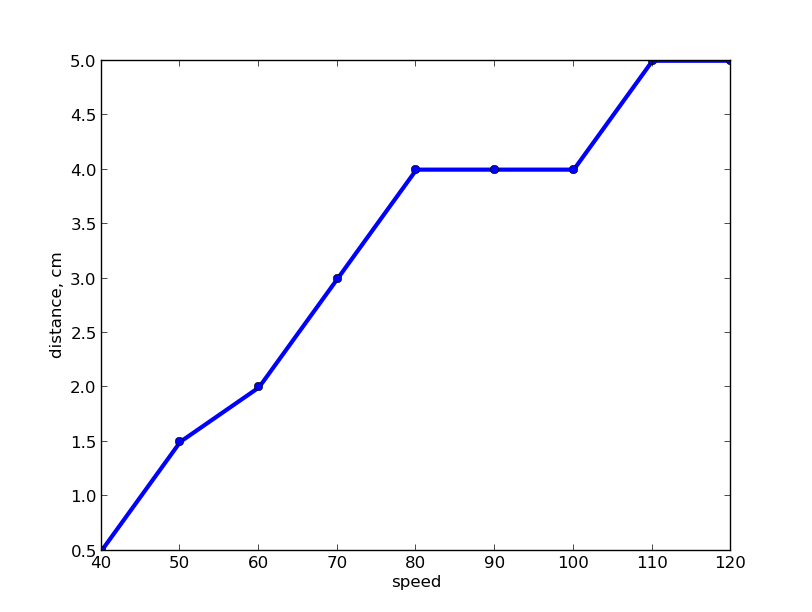
Таким образом, начиная с некоторого момента у нашего робота нет никакой возможности успеть среагировать и остаться на треке.
Что можно сделать?! После того, как сенсоры улавливают поворот, можно остановиться и вернуться назад на некоторое расстояние, зависящее от скорости перед остановкой. Однако мы можем отдать команду роботу ехать с какой-то скоростью, но не можем приказать ему проехать какое-то расстояние.
Для того, чтобы понять зависимость расстояния при заднем ходе от времени, был проведён ещё один замер:
На скорости 50, например, робот проделывал путь, зависящий от времени следующим образом:
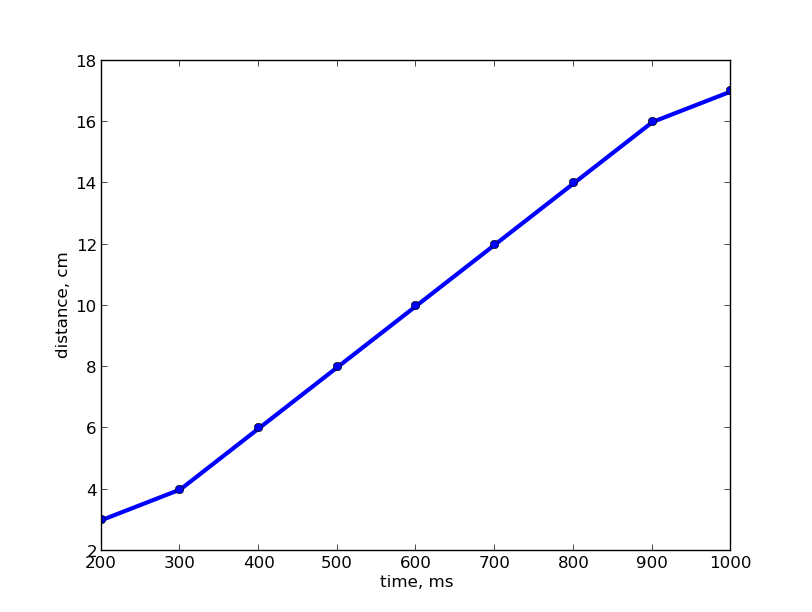
Полученные две зависимости были линейно аппроксимированы, затем была выведена формула зависимости времени, которое надо двигаться назад, от скорости перед остановкой.
Обратим внимание на то, что у вас значения могут оказаться другими: из-за особенностей сборки либо из-за поверхности, поэтому в общем случае лучше провести все измерения самостоятельно.
Адаптивное поведение
Перед финальным экспериментом произведём ещё несколько поправок.
Во-первых, нам необязательно давать команду ехать назад перед каждым поворотом, как мы помним, на маленькой скорости робот прекрасно справляется и без этого. К тому же лучше ему двигаться не прямо назад, а немного поворачивая, всё-таки робот находится перед поворотом.
Во-вторых, нам стоит различать состояния робота: когда он движется по прямой, и ничто ему не мешает ускоряться; и когда робот входит в поворот. В первом случае действительно будем увеличивать скорость робота для более динамичного прохождения трека, во втором случае будем сбрасывать скорость до значения, достаточного для успешного прохождения поворота, и будем держать эту скорость ещё какое-то время.
В итоге наш код будет выглядит следующим образом:
Результат
 Видео
Видео
Что дальше?
Представленный алгоритм оставляет множество возможностей для улучшения и оптимизации. Скорость поворота можно так же менять адаптивно. Можно добавить контроль заноса. Можно поиграть с расположением сенсоров и центром масс. В конце концов можно получить непобедимого на треке робота.
Нет ничего лучше, чем обставить оппонента на секунду-другую.
Источник