Датчики обратной связи (ДОС). Датчик линейных перемещений ДЛП.
Для контроля величин линейных перемещений инструментов у токарно-карусельных станков применяют датчики обратной связи двух типов: многоотсчетное устройство на сельсинах с приводом шестерня-гайка типа Б2Р или индуктивное устройство ДЛП.
Реечный датчик линейных перемещений типа Б2Р состоит из набора точно изготовленных мелкомодульных реек ( m = 0,796), закрепленных на одной из частей контролируемой системы, например на поперечине, на стойке или на ползуне суппорта карусельного станка. Длина реек в наборе соответствует величине контролируемого перемещения. Точность взаимного расположения реек по длине проверяют специальными измерительными устройствами. Непараллельность реек ходу подвижного узла должна лежать в пределах 0,015 мм. При перемещении узла станка по рейкам катится прижимаемая к ним с постоянным усилием шестерня с числом зубьев z=16. Она установлена на входе многоступенчатого устройства автоматического контроля перемещений, состоящего из набора трехфазных сельсинов типа БС-155А. Сельсины соединены между собой последовательно расположенными беззазорными зубчатыми передачами, каждая из которых имеет передаточное отношение 1:10. Каждый сельсин датчика отсчитывает за один оборот 2, 20, 200, 2000 и 20 000 мм линейного перемещения узла. Снимаемые с сельсинов датчика сигналы, соответствующие 1/200 оборота каждого сельсина, подаются в электронно-счетное устройство и указываются по декадам на табло цифровой индикации как величины пройденного перемещающимся узлом пути в сотых или десятых долях миллиметра или в единицах, десятках, сотнях и тысячах миллиметров.
Погрешность отсчета перемещений для реечных датчиков токарно-карусельных станков лежит в пределах 0,016-0,018 мм на длине пути 500 мм. Для повышения точности отсчетов датчик должен быть прогрет перед началом работы в течение 30 мин. Если этого не сделать, то за счет тепловых деформаций погрешность отсчета возрастет на 0,004-0,005 мм.
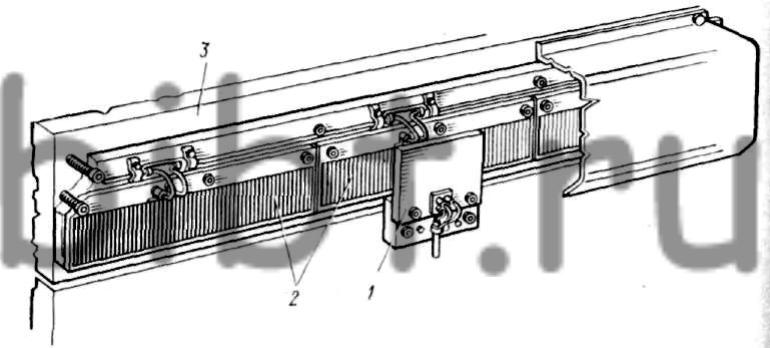
Устройство второго типа — датчик линейных перемещений ДЛП [4], состоящий из набора измерительных шкал 2 и считывающего индуктивного датчика 1, показано на рис. 4.
Рис. 4. Датчик обратной связи ДЛП
Измерительная шкала, служащая базой для отсчетов, укреплена аналогично набору реек реечного датчика на одной из частей 3 станка, относительно которой контролируется перемещение. Длина шкал в наборе соответствует величине контролируемого перемещения. Считывающий датчик укреплен на другой части станка, движение которой контролируется, в специальном кронштейне, обеспечивающем строго постоянное положение датчика относительно шкалы на всем пути перемещения. Величина зазора между ними постоянна и лежит в пределах 0,2- 0,3 мм. В процессе эксплуатации станка и при ремонтах величину этого зазора необходимо проверять.
Каждая входящая в набор шкала-линейка представляет собой стальную пластинку длиной 250 мм с наклеенной накладкой из текстолита. На накладке методом фотопечати нанесена обмотка в виде зигзагообразной медной полоски шириной около 1 мм и шагом 2 мм. Обмотки шкал включены в одну последовательную цепь. Индуктивный датчик состоит из двух таких же, но более коротких обмоток, сдвинутых относительно друг друга на 1/4 шага. Входные сигналы (напряжения) на его обмотки подаются из устройства ЧПУ в форме синусоид. Выходной сигнал снимается с последовательно включенных обмоток линеек.
Погрешность шкал линеек на длине 250 мм обычно лежит в пределах ±10 мкм. В отдельных случаях применяют более точные датчики с погрешностью шкал ±2,5 мкм на той же длине. Погрешность отсчета перемещений на токарно-карусельных станках при применении ДЛП составляет не более 15 мкм на длине хода 500 мм. Изменение этой величины может быть следствием загрязнения шкал осевшей металлической пылью или нарушения взаимного их расположения; последнее устраняют регулировкой. Датчики периодически следует очищать.
Источник
Продам Датчик обратной связи Б2Р местонахождение Кузнецова 8 оф.18
Датчики обратной связи Б2Р, год выпуска: 2005, зав № 1749 , состояние -новый , так же имеется датчик Б2В10 по той же цене, «ООО КОМПЛЕКТ» ИНН 3702084159/ КПП 371101001 КПП 371101001/ ОГРН 1063702001758 Измерительный преобразователь на сельсинах БС-155А является устройством для преобразования величины линейного перемещения подвижных узлов станка в электрический сигнал, используемых в системах программного управления металлорежущих станков. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ Количество ступеней отсчета 5 Максимальная длина измеряемого перемещения, м 20 Дискретность, мм 0, 01 Погрешность приведенна к сельсину 1-ой ступени отсчета преобразователя, мкм 22 Максимальная скорость перемещения контролируемых узлов, м/мин 5 Габаритные размеры, мм 165*110*145 Потребляемая мощность, не более, ВА 20 Масса, кг 8, 7
Имя:
Дмитрий — Другие объявления ООО»Комплект»
Организация:
ООО»Комплект»
Номер объявления: 244834
Сделать VIP-объявлением + Телефон + Ссылка на сайт компании + Всегда Первый
ООО «Энергостройпоставка » г. Москва Юридический адрес: 119571, г. Москва, проспект Вернадского, дом 92, этаж 2, пом. VI, ком.9 ИНН 7719898851, КПП 772901001 ОГРН 5147746463200, ОКПО 40396485, ОКАТО 45263588000, ОКВЭД 51.15.3 Р/с — 40702810438000022408 К/с — 30101810400000000225 в ПАО «Сбербанк России» г. Москва, Адрес банка: г. Москва, Щелковское шоссе, д.34, стр.1 БИК 044525225
Ген. Директор Савина Наталья Викторовна (на основании Устава) Пишите на E-mail указанный в почтовом уведомлении.
ООО «НПФ «ПромРегион» Рудаков Максим Сергеевич Пишите на E-mail указанный в почтовом уведомлении.
Другие объявления по теме: «Продам — Запчасти к станкам»:
Источник
Разнообразие датчиков для обратной связи с двигателем
Билл Швебер, Mouser Electronics
Во многих приложениях для управления движением необходимо знать положение, скорость и порой – ускорение ротора двигателя или его нагрузку.
В зависимости от особенностей приложения контроллеру двигателя либо требуются точные или приблизительные значения этих параметров, либо они будут совсем не нужны. Если известно состояние двигателя и положение ротора, то управляющий контроллер работает с замкнутым контуром обратной связи.
Конечно, скорость, положение и ускорение двигателя тесно связаны между собой. Поскольку скорость – это производная от положения (по времени), а ускорение – производная от скорости, то все три параметра можно определить, зная только один из них (дополнительно заметим, что скорость является интегралом от ускорения, а положение – интегралом от скорости).
Однако на практике такой метод определения связанных параметров часто (но не всегда) дает неточные результаты из-за малого разрешения и высокого шума. Например, зная, что ротор завершил очередной оборот, можно определить все три переменные, но с очень низким и обычно неприемлемым разрешением. В зависимости от приложения требуемое разрешение и точность могут варьироваться от грубого до умеренного и точного.
Станок с ЧПУ нуждается в точной информации о положении ротора, контроллер стеклоподъемника автомобиля может работать с приблизительными данными, а для стиральной машины или сушилки одежды будет достаточно и грубых значений.
Замыкая контур обратной связи
Для определения положения ротора или обнаружения движения наиболее часто используются резольверы, оптические или емкостные энкодеры и датчики Холла, которые в данном случае расположены в порядке убывания точности, разрешения и стоимости. Эти датчики сильно отличаются по принципу действия, конструкции и электрическому интерфейсу, поэтому разработчики должны определить, какой из вариантов будет лучшим выбором в данном приложении, и как будет осуществляться связь датчика со схемой контроллера.
Инкрементальные энкодеры (используются, когда требуется определить только относительное положение, или если стоимость является критичной) обычно работают вместе с асинхронными двигателями переменного тока. А вот абсолютные энкодеры (которые формируют для каждого положения вала свой выходной двоичный код, то есть определяют абсолютное положение вала) часто используются совместно с бесколлекторными двигателями с постоянными магнитами в сервоприводах. Нужна ли инкрементальная или абсолютная информация – определяют, в первую очередь, особенности приложения.
Хотя в настоящее время в большинстве случаев управление двигателем осуществляется через цифровой контур управления, сам сигнал датчика оказывается либо полностью аналоговым, и его необходимо оцифровать, либо представляет собой двоичный сигнал, но с напряжением и другими характеристиками, делающими его несовместимым со стандартной цифровой схемой. Некоторые из датчиков обратной связи поставляются с «сырым» выходом, и их выходной сигнал необходимо согласовывать. Есть и такие, которые имеют согласованные, готовые к подключению выходы, совместимые со стандартными портами ввода/ вывода, форматами и протоколами.
Хотя повышение разрешения с первого взгляда кажется хорошей идеей, на практике это не всегда так. Использование избыточного разрешения способно замедлить работу системы, так как требует дополнительной обработки информации, которая может быть как полезной, так и бесполезной. Поэтому ограничение разрешения на минимально допустимом уровне – хорошая идея.
«Настоящим я разрешаю…»
Резольверы — это точные и надежные абсолютные датчики положения. Они работают по принципу трансформатора с одной первичной и двумя вторичными обмотками, которые смещены на 90° относительно друг друга.
Эффективное соотношение витков обмоток и полярность между первичной и вторичной обмотками меняются в зависимости от угла поворота вала. Первичная обмотка возбуждается опорным переменным сигналом с постоянной частотой, которая может варьироваться от 50/ 60 Гц до нескольких сотен кГц, а сигналы вторичных обмоток оказываются не в фазе из-за их физического смещения. Пиковые напряжения вторичных обмоток меняются по мере вращения вала и пропорциональны углу поворота. При демодуляции этих выходных напряжений с использованием эталонного сигнала первичной обмотки схема резольвера может обеспечивать определение угла вала с высоким разрешением.
Резольвер не только точен, но и надежен. В нем нет механического контакта между первичной и вторичной обмотками, нет отдельных щеток или подшипников в дополнение к тем, которые есть у самого двигателя, нет точек трения, которые могут привести к износу деталей, и возможности загрязнения (например, маслом), которые могли бы помешать работе. Благодаря механической надежности и точности резольверы широко применяются в таких особо ответственных и сложных приложениях как измерение углов вращения в артиллерийских орудиях.
Однако резольверы громоздки и относительно дорогостоящи по сравнению с альтернативными решениями, а также потребляют достаточно большую мощность, что неприемлемо для малопотребляющих систем. Они также требуют относительно сложных схем для генерации и демодуляции сигналов переменного тока, хотя это не столь большая проблема при использовании современных ИС. Резольверы позволяют определять абсолютное положение вала сразу после включения питания; для выполнения измерений им не нужно какое-либо начальное движение или определение начального угла поворота. Конечно, эта особенность принципиально необходима для одних приложений, и абсолютно неважна для других.
Кодирование положения, а не данных
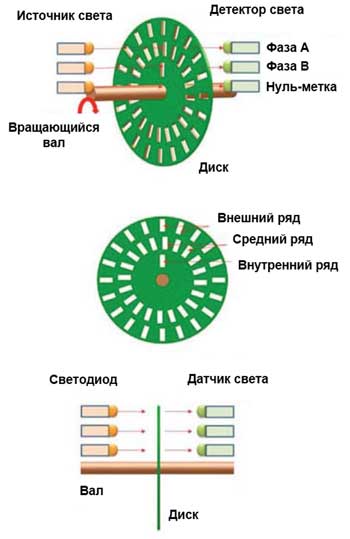
Оптический энкодер (термин «энкодер» здесь не связан с кодированием цифровых данных) является инкрементальным датчиком положения, в котором используется источник света (светодиод), два фотодатчика, смещенных друг относительно друга на 90°, и стеклянный или пластиковый диск между ними (рис. 1). На диске вырезаны тонкие щели, исходящие из центра. При вращении диска датчики видят чередование светлых и темных полос.
Количество щелей на диске и некоторые другие параметры определяют разрешение датчика, которое обычно составляет 1024, 2048 или даже 4096 отсчетов на оборот. В отличие от трансформаторных датчиков, таких как резольверы, оптические энкодеры долгое время не были массово представлены на рынке, пока не появились долговечные светодиоды и эффективные фотодатчики.
Рис. 1.
Оптические энкодеры.
Физическое расположение фотодатчиков позволяет энкодеру определять направление вращения. Основная схема преобразует выходные импульсные последовательности двух датчиков (называемых выходами A и B) в пару битовых потоков, по которым можно судить как о движении, так и о его направлении.
Однако энкодер является инкрементальным, а не абсолютным датчиком положения. Чтобы определять абсолютное положение, в большинство энкодеров добавляют третий выход и фотосенсор для получения нуль-метки. При этом вал должен совершить достаточный поворот, чтобы поймать этот сигнал. Есть способы добавления к оптическому энкодеру полноценного сигнала абсолютного положения, но это усложняет устройство датчика.
Оптические энкодеры предлагают очень хорошее разрешение, но они не так надежны, как резольверы: на пути прохождения оптического сигнала может оказаться грязь, или кодирующий диск может быть загрязнен. Однако производительность энкодеров более чем достаточна для многих приложений — они компактные, легкие, имеют небольшое потребление, просты в подключении и отличаются малой стоимостью.
Примерами типовых оптических датчиков для двигателей и систем с вращением являются двухканальные модули HEDS-9000 и HEDS-9100 производства Avago Technologies (теперь — Broadcom). Эти недорогие высокопроизводительные модули включают в себя светодиоды с линзами и микросхему детектора, которые вместе с управляющей электроникой и выходным интерфейсом помещены в небольшой пластиковый корпус C-образной формы (рис. 2). Модули имеют сильно коллимированный источник света и особое расположение фотоприемника, что делает их малочувствительными к несоосности при установке.
Рис. 2.
Двухканальные модули HEDS-9000 и HEDS-9100.
Обратите внимание, что кодирующий диск, называемый кодовым колесом, приобретается отдельно, с разрешением 500 CPR (отсчетов на оборот) и 1000 CPR для HEDS-9000 и 96…512 CPR для HEDS-9100. Модули имеют два канала (A и B) с TTL-совместимыми цифровыми выходами и требуют одного источника питания 5 В.
Существует альтернатива оптическим энкодерам – энкодеры, использующие емкостную связь вместо оптической, как, например, в датчиках CUI AMT10 Series (рис. 3). Это семейство включает ряд надежных высокоточных модулей, доступных в инкрементальных и абсолютных версиях, с разрешением до 12 бит (4096 отсчетов). Разрешение выбирается пользователем из 16 значений с помощью четырехпозиционного DIP-переключателя. Состояние квадратурных выходов A/ B этих модулей передается по стандартному CMOS-совместимому интерфейсу SPI.
Рис. 3.
Емкостный энкодер CUI AMT10.
В отличие от оптических энкодеров в CUI AMT используется повторяющийся выгравированный рисунок из проводников на движущейся и неподвижной частях энкодера. При вращении энкодера относительная емкость между двумя частями увеличивается или уменьшается, и это изменение емкости детектируется, что несколько похоже на работу фототранзисторов в оптическом энкодере. При этом влияние пыли и загрязнений оказывается незначительным.
Стоит иметь в виду, что резольверы и энкодеры все-таки являются механическими системами с особыми требованиями к монтажу и электрической совместимости. Чтобы не производить множество разных уникальных датчиков, CUI предлагает для серии AMT10 различные вспомогательные аксессуары: рукава, крышки и монтажные основания. Поэтому один и тот же базовый датчик может использоваться с валами различного диметра и для различных способов установки. Резольверы и энкодеры обеспечивают измерения с разрешением до 1/100° (0.6 угловой минуты) или даже лучше, но разрешение — это не то же самое, что точность (для некоторых приложений более важен первый параметр, а для других приложений — второй).
Независимо от того, используется ли в системе резольвер или энкодер, в ней все равно существуют источники ошибок: температурная погрешность, изменение скорости вращения, нежелательные фазовые сдвиги и другие факторы. Однако производители этих устройств разработали способы устранения или компенсации многих из этих погрешностей. Для этого часто используются промежуточные схемы на основе ИС, которые помещают между необработанным выходным сигналом сенсора и приведенным выходом, который поступает на системный контроллер.
Наступление датчиков Холла
Еще один класс энкодеров или датчиков, основанный на давно известном принципе, требует эффективной полупроводниковой электроники и наличия подходящих корпусных исполнений. Кроме того, важная интерфейсная схема, способная работать с минимальным напряжением и легко взаимодействовать с системой, теперь доступна в интегральном исполнении, что еще больше упрощает использование этой технологии. Устройства с датчиками Холла могут применяться как для измерения тока через проводник, который является частью датчика, так и для обнаружения окружающего магнитного поля.
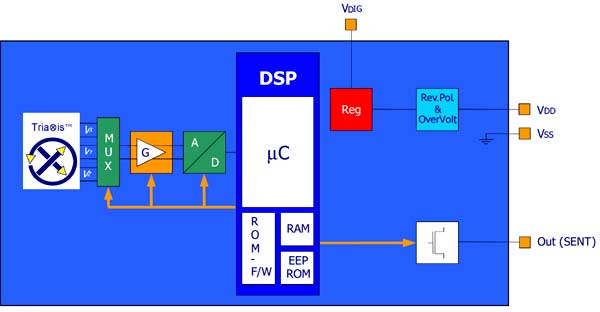
В состав некоторых датчиков Холла входит не только сам сенсор. Например, трехосевой датчик положения MLX90367 производства компании Melexis представляет собой интегральную микросхему абсолютного датчика, чувствительного к плотности магнитного потока, проходящего перпендикулярно и параллельно поверхности ИС. Он чувствителен к трем составляющим плотности потока, что позволяет MLX90367 (совместно с корректной магнитной системой) распознавать абсолютное положение любого движущегося магнита (например, вращение в диапазоне 0…360°).
Данное устройство, имея 12-битное разрешение, способно выполнять обработку сигнала с помощью встроенного микроконтроллера и DSP (рис. 4). Это позволяет делать необходимые вычисления, вносить поправки для существующих нелинейностей и многое другое. Микросхема имеет множество особенностей и функций, выбираемых пользователем, а также поддерживает различные форматы выходных данных, включая расширенный формат со встроенной коррекцией ошибок SENT (SAE J2716-2010), который широко используется в автомобильных приложениях.
Рис. 4.
Melexis MLX90367.
Большинство магнитных энкодеров с датчиками Холла использует специальное колесо, прикрепленное к валу двигателя. По периметру данного колеса располагаются полюса с северным и южным направлениями намагничивания. Такая конструкция представляет собой магнитный аналог кодирующего диска оптических энкодеров. Колесо обычно изготавливают из феррита, литого под давлением, в который встроен массив намагниченных элементов. Типичное колесо имеет 32 полюса (16 северных и 16 южных), поэтому разрешение оказывается намного меньше, чем для оптических энкодеров или резольверов, но зачастую этого достаточно для многих приложений. Обычно используется одновременная установка трех датчиков Холла, расположенных с электрическим смещением 120° друг от друга.
Заключение
Разработчики, которым требуется определять положение вала двигателя, скорость или ускорение, имеют в своем распоряжении богатый выбор вариантов решений, охватывающих широкий диапазон ключевых характеристик и параметров производительности. Резольверы, оптические и емкостные датчики, а также датчики Холла имеют свою специфику. Тот или иной вариант может оказаться более предпочтительным за счет особенностей конкретных приложений.
Статью подготовил и перевел Гавриков Вячеслав, г. Смоленск, по материалам журнала «Electronics information update».