Метеостанция своими руками

Метеостанция построена на Picaxe микроконтроллере от Revolution Education Ltd и состоит из двух основных частей: наружный блок, который посылает свои данные каждые 2 секунды, используя передатчик на частоте 433МГц. И внутренний блок, который отображает полученные данные на 20 х 4 ЖК-дисплее, а также атмосферное давление, которое измеряется локально во внутреннем блоке.
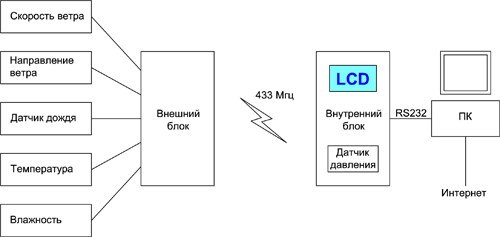
Я пытался сохранить дизайн максимально простым и в то же время функциональным. Связь устройства с компьютером осуществляется через COM-порт. В настоящее время на компьютере непрерывно строятся графики из полученных значений, а также идет отображение значений на обычных индикаторах. Графики и показания датчиков доступны на встроенном веб-сервере, все данные сохранятся и т.о. можно посмотреть данные за любой промежуток времени.

Постройка метеостанции заняло несколько месяцев, от разработки до завершения, и в целом я очень доволен результатом. Я особенно рад, что мне удалось построить все с нуля при помощи обычных инструментов. Меня она полностью устраивает, но совершенству предела нет, и особенно это касается графического интерфейса. Я не предпринял никаких попыток коммерциализации метеостанции, но если вы думаете о создании метеостанции для себя, то это хороший выбор.
Уличные датчики
Датчики используются для измерения температуры, влажности, осадков, направления и скорости ветра. Датчики представляют собой сочетание механических и электронных устройств.
Датчик температуры и относительной влажности воздуха
Измерение температуры, пожалуй, проще всего. Для это используется датчик DS18B20. Для измерения влажности был использован HIH-3610, выдающий напряжение 0.8 — 3.9В при влажности 0% до 100%
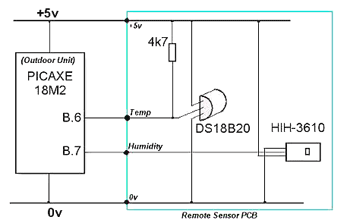
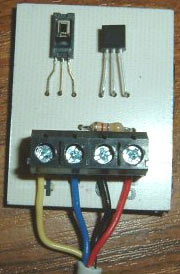
Я установил оба датчика на небольшой печатной плате. Плата установлена внутри самодельного корпуса, который предотвращает воздействие дождя и других внешних факторов.
Упрощенный код для каждого из датчиков приведен ниже. Более точный код, который считывает значения с точностью до одной десятой, показан на сайте Питера Андерсона. Его код используется в окончательном варианте метеостанции.
Датчик температуры обеспечивает точность ± 0.5 °C. Датчик влажности обеспечивает точность до ± 2%, так что это не очень важно, сколько знаков доступно после запятой!
Пример участка из программного обеспечения, работающего на ПК.
Температура
Расчет показаний датчика влажности
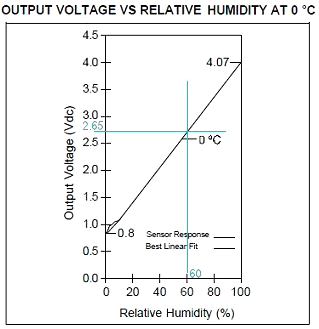
Расчеты взяты из документации датчика Honeywell HIH-3610. На графике показывана стандартная зависимость при 0 °C.
Напряжение с датчика измеряется на входе АЦП (B.7) микроконтроллера Picaxe 18M2. В коде, показанном выше, значение, которое представлено в виде числа от 0 до 255 (т.е. 256 значений), хранится в переменной b1.
Наша схема питается от 5В, так что каждый шаг АЦП равен:
5/256 = 0.0195 В.
На графике видно начально значение АЦП 0.8 В:
0.8 / 0.0195 = 41
Взяв значения из графика, наклон графика (с учетом смещения) примерно:
Напряжение выхода / % относительной влажности или
(2.65 — 0.8) / 60 = 0.0308 В в% RH
(В документации 0.0306)
Рассчитаем кол-во шагов АЦП на 1% влажности:
(В на % RH) / (шаг АЦП)
0.0308 / 0.0195 = 1.57
% RH = значение с АЦП — смещение АЦП / (шаги АЦП в % RH), или
% RH = значение с АЦП — 41 / 1.57
Итоговая формула расчет для микроконтроллера будет выглядеть: % RH = значение с АЦП — 41 * 100/157
Защитный корпус

Начните с разрезания каждой панели на две части. Планки на одной части будут крепко прикреплены с двух сторон, а на второй части только с одной стороны. Не выбрасывайте эти части — они используются.

К целым частям прикрепите два деревянных бруска 20мм х 20мм сверху и с низу, и прикрутите к ним другие части.

Обрежьте одну из частей с одной целой стороной по размеру и приклейте ее к внутренней стороне одной из сторон. Убедитесь, что планки приклеены так, что образуют вместе «^» форму. Сделайте так со всеми сторонами.

Измеритель скорости и направления ветра
Механическая часть
Датчики скорости и направления ветра представляют собой сочетание механических и электронных компонентов. Механическая часть идентична для обеих датчиков.

12мм вставка из фанеры (marine ply) находится между трубой из ПВХ и диском из нержавеющей стали в верхнем конце трубы. Подшипник приклеен к диску из нержавеющей стали и удерживается нержавеющей пластиной.

Как только все будет полностью собрано и настроено, открытые места герметизируются герметиком для водонепроницаемости.

Остальные три отверстия на фотографии предназначены для лопастей. Лопасти длиной 80 мм дают радиус поворота 95мм. Чашки 50 мм в диаметре. Для них я использовал обрезанные флаконы от одеколона, которые имеют почти сферическую форму. Я не уверен в их надёжности, поэтому сделал их легкозаменяемыми.
Электронная часть
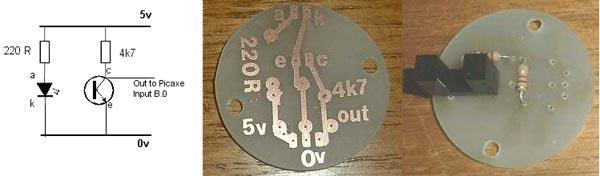
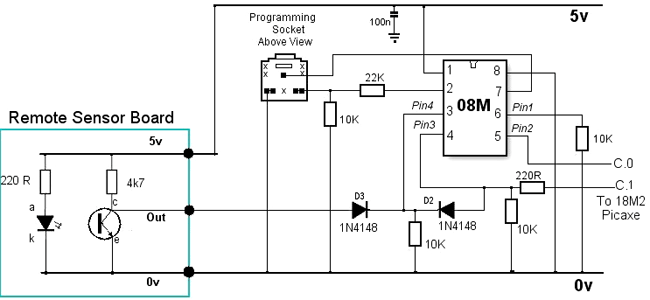
Электроника для датчика скорости ветра состоит только из транзисторного ключа, фотодиода и двух резисторов. Они монтируются на небольшой круглой ПП диаметром 32мм. Они установлены в трубе свободно, чтобы влага в случае её попадания стекала вниз не задевая электронику.

Калибровка анемометра
Анемометр — один из трех датчиков, который необходимо откалибровать (два других – счетчик осадков и датчик атмосферного давления)
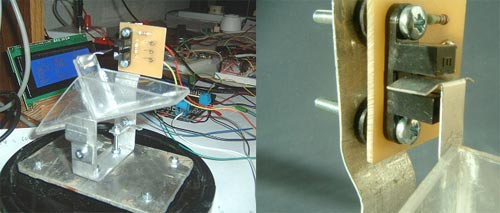
Фотодиод обеспечивает два импульса за один оборот. В простой «последовательной» системе, к которой я стремился (все датчик опрашиваются поочередно), должен быть компромисс между длиной времени, затрачиваемого на опрос каждого датчика (в данном случае, подсчет импульсов) и отзывчивость системы в целом. В идеале, на полный цикла опроса всех датчиков должно уйти не более 2-3 секунд.

На фото выше проверка датчика при помощью мотора с регулируемыми оборотами.
Я хотел откалибровать его при движении на автомобиле, но на это не было времени. Я живу в относительно плоской местности с аэропортом в нескольких километрах рядом, поэтому я калибровал датчик, сравнивая мои показания скорости ветра с показаниями аэропорта.
Если бы мы имели 100% КПД и лопасти вертелись-бы со скоростью ветра, то:
Радиус ротора = 3.75″
Диаметр ротора = 7.5″ = 0.625 фута
Длина окружности ротора = 1.9642 фута
1 фут/мин = 0.0113636 м/ч,
1.9642 фут/мин = 1 об = 0.02232 м/ч
1 м/ч = 1 / 0.02232 об
1 м/ч = 44.8 об
? м/ч = об / 44.8
= (об/мин * 60) / 44.8
Поскольку за поворот выходит два импульса
? м/ч = (импульсов в секунду * 30) / 44.8
= (импульсов в секунду) / 448
Датчик направления ветра — механическая часть
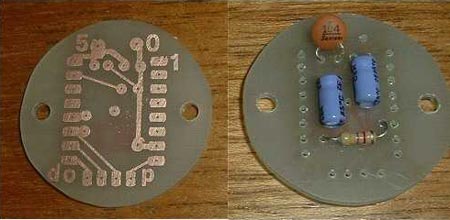
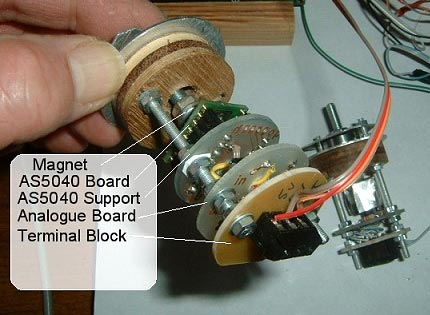
В датчике направления ветра, вместо алюминиевой пластины используется магнит, а вместо оптоэлектронного узла — специальная микросхема AS5040 (магнитный энкодер).

На фото ниже показан 5мм магнит, установленный на торце центрального винта. Выравнивание магнита относительно микросхемы очень важно. Магнит должен быть точно по центру на высоте около 1мм над микросхемой. Как только все будет точно выровнено, датчик будет работать правильно.

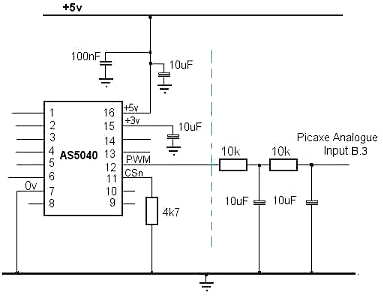
Датчик направления ветра — электронная часть
Существуют различные схемы для измерения направления ветра. В основном они состоят либо из 8 герконов расположенных под углом 45 градусов с интервалом вращающегося магнита или потенциометра который может полностью проворачиваться.
Оба метода имеют свои преимущества и недостатки. Основным преимуществом является то, что они оба просты в реализации. Недостатком является то, что они подлежат износу — особенно потенциометры. Альтернативой использованию герконов будет использовать датчика Холла для решения механического износа, но они по-прежнему ограничиваются 8 различными позициями . В идеале, я хотел бы попробовать что-то другое и в конечном счете решил о AS5040 — поворотном магнитном датчике IC. Хотя это устройство для поверхностного монтажа (которого я стараюсь избегать), оно имеет ряд преимуществ, которые делают ее использование привлекательным!
Он имеет несколько различных форматов вывода, два из которых наиболее подходит для нашей цели. Наилучшая точность достигается с помощью SSI интерфейса. AS5040 выдает импульсы длиной от 1 мкс при 0° и до 1024 мкс при 359,6°
Проверка калибровки датчика направления ветра:

Измеритель уровня осадков
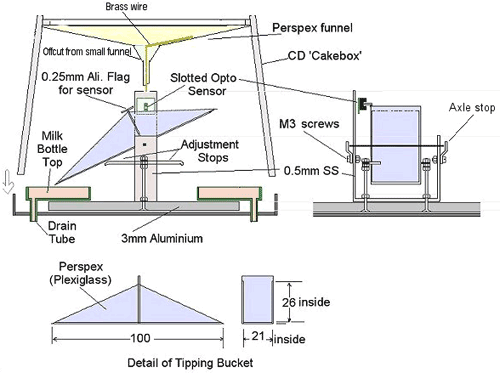
Насколько это возможно, я сделал дождемер из пластика и нержавеющей стали, основание сделано из алюминия толщиной 3 мм для жесткости.
В измерителе уровня осадков есть две ведерка. Каждое ведерко вмещает до 6 мл воды до его смещения центра тяжести, которое заставляет его вылить воду в ёмкость и подать сигнал на датчик. Когда ведро опрокидывается, алюминий флаг проходит через оптический датчик, посылающий сигнал на электронику наружного блока.

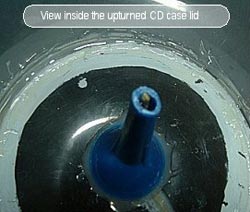
На данный момент, я оставил его с прозрачными стенками (потому что интересно наблюдать это работает!). Но я подозреваю, что нужно покрасить его белой краской, чтобы отражать тепло летом, во избежание испарения. Я не мог найти маленькую воронку, поэтому пришлось сделать её самому. Обратите внимание на проволоку внутри воронки и по центру желоба. Это поможет остановить поверхностное натяжение воды в воронке и помогает капать воде. Без проволоки, дождь имел бы тенденцию к «водовороту», и его траектория была-бы непредсказуемой
Оптодатчики крупным планом:
Электронная часть дождемера
Из-за случайного характера работы датчика, программное прерывание в микроконтроллере наружного блока, казалось, логичный подход. К сожалению, некоторые команды программы, отключают механизм прерываний в то время, как они выполняются, т.о. есть вероятность, что сигнал придет в никуда. По этим причинам, дождемер имеет собственный микроконтроллер 08М Picaxe.
Использование отдельного чипа позволяет использовать его для создания достаточно точной 1-часовой задержки для того, чтобы считать ведра в час.
Picaxe 18м2 получает текущее количество ведерок в час и выводит его на дисплей и компьютер.
В качестве отправной точки, я использую следующие данные:
Воронка диаметров 120мм и емкость площадью 11,311мм2
1 мм дождя = 11,311мм3 или 11,3 мл.
Каждое ведро это 5,65 мл. Таким образом, 2 ведра 2 х 5,65 = 11,3 мл (или 1 мм) осадков. Одно ведро = 0,5 мм осадков.
Для сверки, я купил дешевый стакан для измерения осадков.
Наружный блок
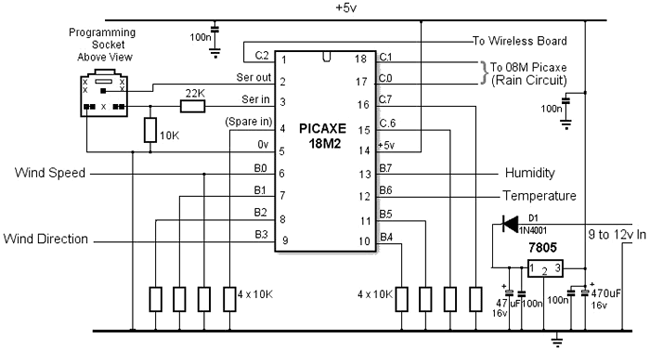
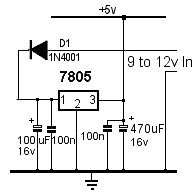
Для вышеприведенной схемы и схемы 08М Picaxe для датчика используется одна и та же топология печатной платы. Устройство питается от аккумулятора 12V 7Ah через стабилизатор 7805.
Я использовал набор RF Connect kit для беспроводной связи на 433 МГц. Комплект содержит пару специально запрограммированных PIC контроллеров. Комплект беспроводных модулей в ходе испытаний зарекомендовал себя как достаточно надежный.
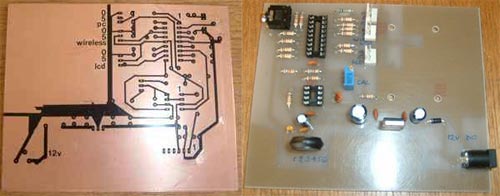
Печатная плата
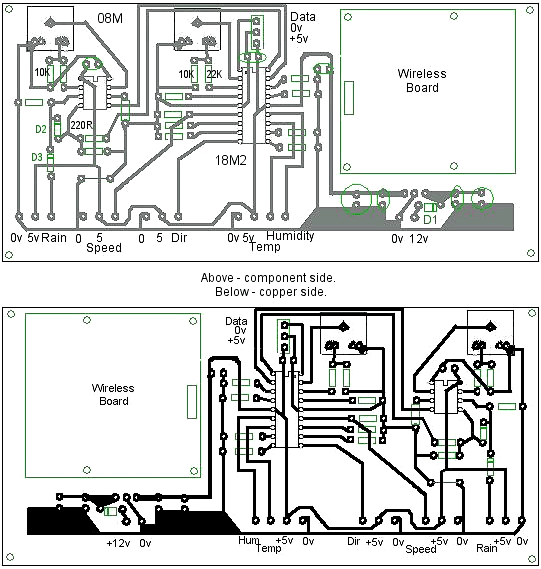
На ПП установлен 08М Picaxe и 18м2. Каждый из них имеет свой собственный разъем программирования. Отдельные разъемы, каждый со своим +5 В, предназначены для каждого датчика — за исключением температуры и влажности.
Обратите внимание, что я нарисовал чертёж в Paintshop Pro поэтому я не могу гарантировать точность расстояния между выводами.


Внутренний блок
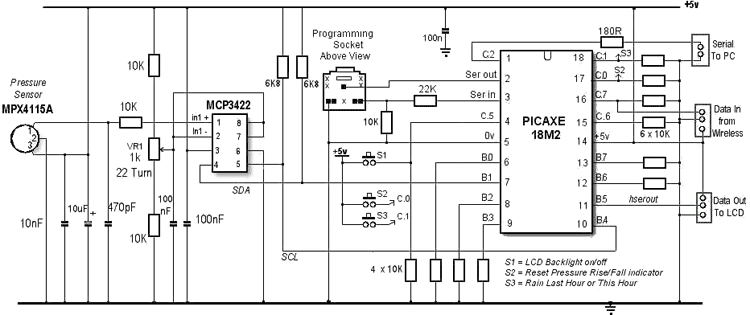
Во внутреннем блоке используетя 18м2 Picaxe, датчик давления и ЖК-дисплей. Также есть стабилизатор напряжения 5В.
Датчик давления
После нескольких неудачных попыток, я остановился на MPX4115A. Хотя другие датчики имеют диапазон измерения немного больше, они труднодоступны. Кроме того, другие датчики, как правило, работают от 3,3В и требуют дополнительный стабилизатор. MPX4115A выдает аналоговое напряжение от 3,79 и до 4,25В пропорционально давлению. Хотя это почти достаточное разрешение для обнаружения 1 мбар изменения давления, после некоторого обсуждения на форуме, я добавил АЦП MCP3422. Он может работать в 16-битном режиме (или выше) по сравнению с 10-битном режиме Picaxe. MCP3422 может быть связан (как в нашей схеме) в дифференциальный режим с аналоговым входом от датчика. Основным преимуществом является то, что это позволяет корректировать выход датчика, тем самым легко компенсировать ошибки MPX4115A и обеспечить простой способ калибровки датчика.
MPC3422 на самом деле имеет два дифференциальных входа, но так-как один не используется они замкнуты. Выход из MCP3422 имеет интерфейс I2C и соединяется с SDA и SCL контактам на 18м2 Picaxe – выводы B.1 и B.4 соответственно. С моей точки зрения, единственный недостаток в использовании MCP3422 том, что это небольшое устройство для поверхностного монтажа, но я его припаял к адаптеру. В дополнение к I2C интерфейсу MCP3422 18м2 просто обрабатывает поступающие данные из 433МГц беспроводной приемник, выводит данные на дисплей и передает данные на ПК. Для того чтобы избежать ошибок внутреннего блока когда компьютер не работает, нет никаких ответов от ПК. Внутренний блок передает данные и идет дальше. Он передает данные приблизительно в 2-секундным интервалом, чтобы потери данных быстро компенсировались следующий раз. Я использовал незадействованные порты на 18м2 для подключения кнопки на передней панели. Переключатель S1 (вход С.5) используется для включения подсветки ЖК-дисплея. Переключатель S2 (вход C.0) сбрасывает значение давления (мбар) на ЖК-дисплее. Переключатель S3 (вход C.1) переключает осадки отображаемые на ЖК-дисплее между общим в предыдущий час и текущими. Кнопки необходимо удерживать более 1 секунды для их реакции.
Сборка внутреннего блока

Как и в печатной плате для наружного блока, я нарисовал макет вручную с помощью Paintshop Pro, так что в расстояниях могут быть ошибки
Плата немного больше, чем это необходимо, чтобы вписаться в пазы в алюминиевом корпусе.
Я сознательно сделал разъем для программирования немного «внутрь» от края платы, чтобы предотвратить его прикосновение к корпусу. Вырез для ЖК-дисплея производится высверливание и подгонкой до точных размеров.

На фото показано всё уже установленное в корпус.
Штырьки на плате делают сложным её установку в корпус, поэтому мне пришлось отпаять их и припаять дисплей к плате проводами.

Внешний блок — код Picaxe
Использовано памяти = 295 байт из 2048
Счетчик количества осадков — 08M код
Внутренний блок — код Picaxe
Использовано памяти = 764 байт из 2048
Программное обеспечение для ПК
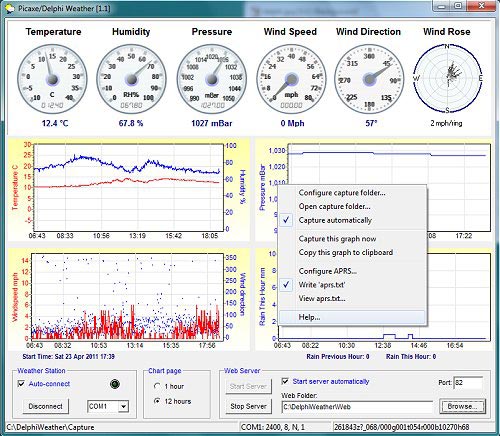
Программное обеспечение, работающее на ПК было написано с использованием Borland Delphi 7. Оно довольно примитивно в его нынешнем виде, но это, по крайней мере, показывает связь Picaxe с компьютером.
Источник