Датчики момента
В гироскопе установлены магнитоэлектрические датчики момента (рис. 2.7). Датчики по обеим осям имеют общий ротор, представляющий собой монолитный кольцевой магнит, входящий в состав маховика.
Статоры датчиков момента приклеены к латунной детали, закреплённой на корпусе, и служащей для отвода тепла от обмоток ДМ при работе гироскопа в условиях больших скоростей, т.е. при больших токах. Каждый из статоров датчика момента состоит из двух последовательно соединенных катушек основной (измерительной) обмотки и так же соединённых катушек вспомогательной обмотки. Основная обмотка используется в режиме измерения, а дополнительная задействуется при испытаниях.
Для регулировки крутизны датчиков момента служат прокладки между статором и латунной деталью.
На латунную деталь намотана катушка, являющаяся термодатчиком датчика момента.
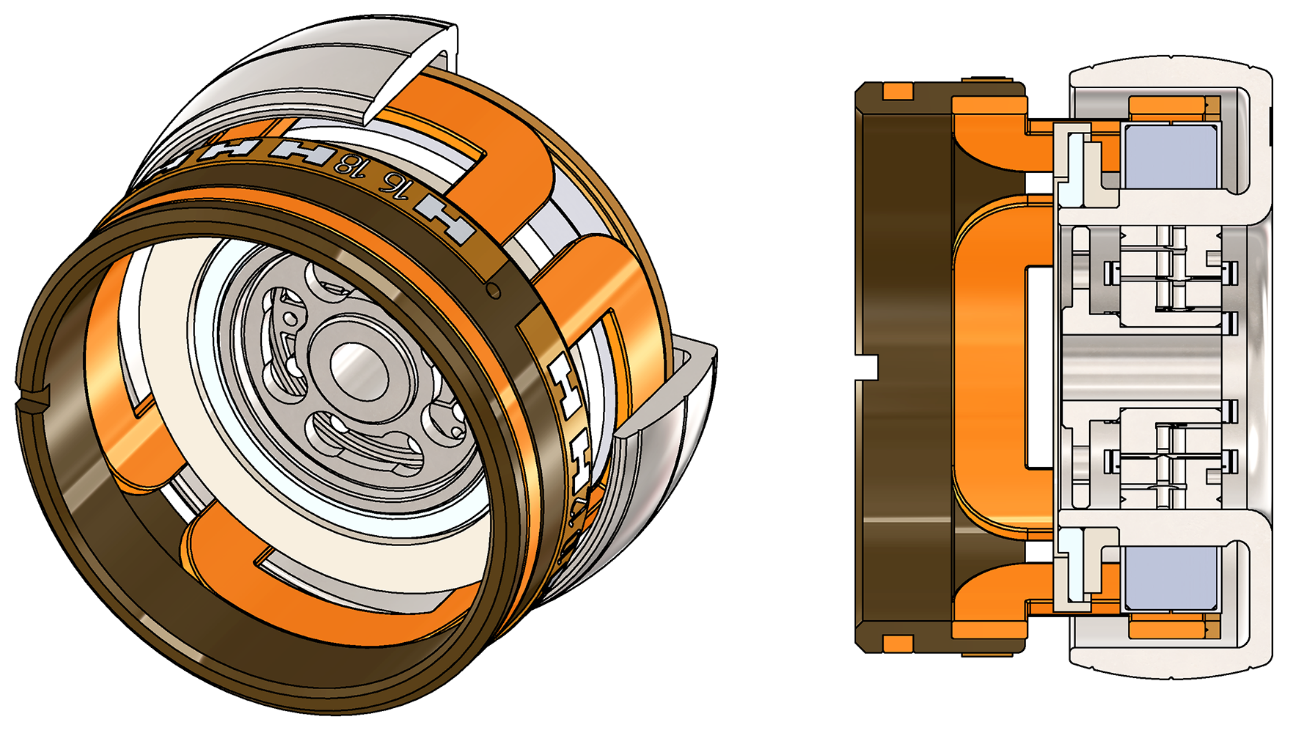
Рис. 2.7. Магнитоэлектрические датчики момента
Датчики угла
Для регистрации угла поворота маховика в гироскопе применены индуктивные датчики угла (рис. 2.8). Неподвижная (статорная) часть датчика угла представляет собой П-образный сердечник из металлокерамики, на который намотаны две одинаковые катушки, соединённые последовательно. ДУ по каждому из каналов содержит два таких сердечника с катушками, расположенные диаметрально. Датчики угла питаются напряжением 2,5 В частотой 32 кГц. Обмотки вместе с балансировочными резисторами образуют мостовую схему, съём выходного сигнала датчика угла осуществляется с её диагонали, образованной средними точками обмоток.
Статоры датчиков угла наклеены на корпус, кольцевой ротор – общий для всех датчиков – входит в состав маховика. Величина крутизны ДУ регулируется прокладкой между фланцем вала и маховиком.
При центральном положении маховика воздушные зазоры между ротором и сердечниками датчика угла равны, индуктивности обмоток одинаковы и мост сбалансирован. При наклоне маховика указанные воздушные зазоры изменяются: для одного сердечника воздушный зазор увеличивается, а для другого – уменьшается. При этом индуктивность одной обмотки уменьшается, а другой – увеличивается. В результате баланс моста нарушается и на выходной диагонали мостовой схемы появляется напряжение, пропорциональное углу поворота маховика. Изменение направления поворота маховика вызывает изменение фазы выходного напряжения на 180°, т. е. характеристика датчика угла является реверсивной.
Выбранные датчики угла не создают относительно измерительной оси момента сухого трения, т. к. являются бесконтактными, а моменты, обусловленные силами притяжения ротора к сердечникам, направлены в противоположные стороны и поэтому почти полностью взаимно компенсируются.
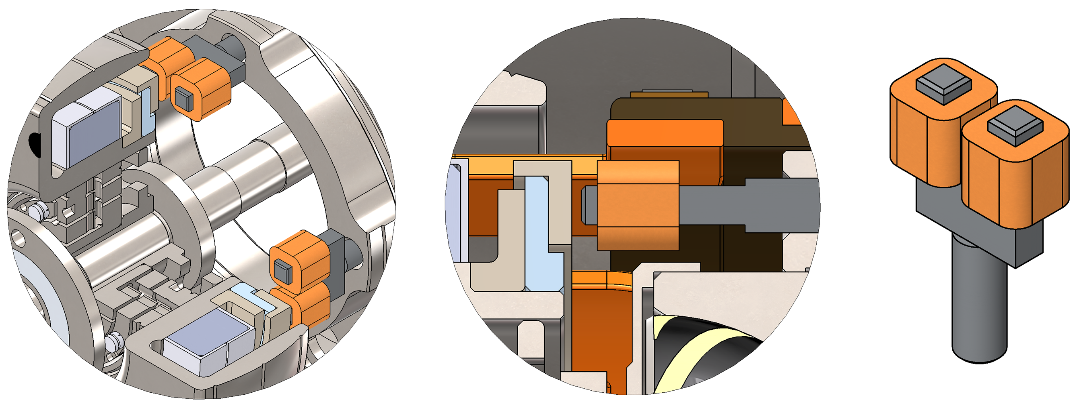
Рис. 2.8. Индуктивные датчики угла
Электрическая схема прибора кинд05-091
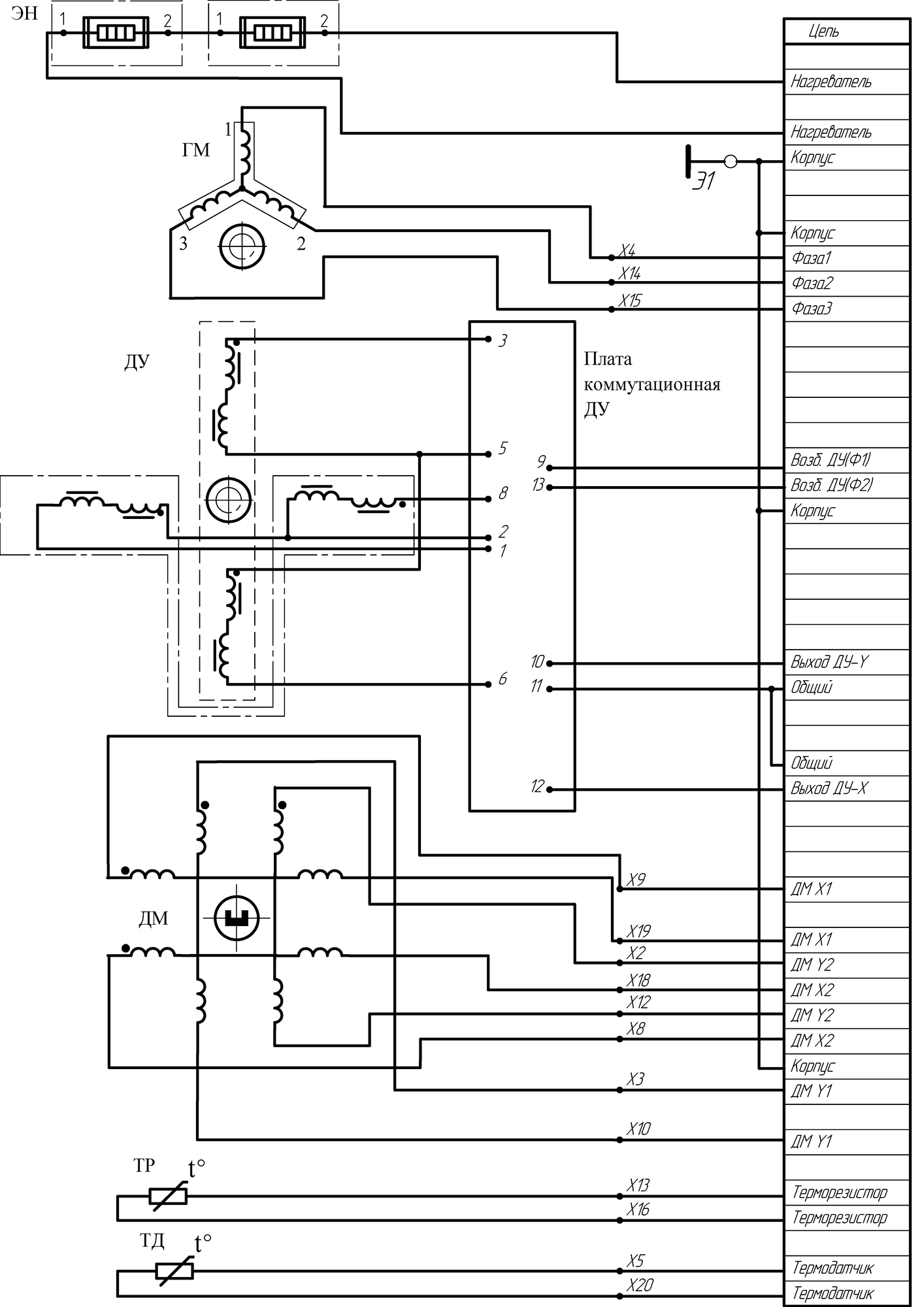
Рис. 2.9. Электрическая схема ДНГ (КИНД05-091)
2.3. Проверка достоверности твердотельной модели
Проведём сравнение некоторых массовых характеристик модели с характеристиками реального образца прибора КИНД05-091 (таблица 2.1).
Таблица 2.1. Сравнение характеристик модели и реального прибора
Источник
Виды и принципы действия датчиков угла поворота
Точное определение угла поворота вала — одна из главных задач, стоящих перед конструкторами, разрабатывающими электроприводы, станки с ЧПУ и различные роботизированные комплексы. Датчики поворота обеспечивают обратную связь с исполнительными механизмами, позволяя реализовывать сложные алгоритмы управления. Датчики угла поворота могут работать на различных физических принципах и обладать различными характеристиками. В этом обзоре я постараюсь понятно изложить информацию о наиболее часто используемых датчиках.
На сегодняшний день можно выделить несколько видов датчиков угла поворота, активно использующихся в промышленности. В первую очередь датчики угла поворота различны по физическим принципам действия: резистивные, индуктивные, магнитные и оптикоэлектронные. Далее датчики разделяются по диапазону измеряемых углов, на неполнооборотные, однооборотные и многооборотные. Также датчики различаются по возможности однозначного определения положения после включения питания — на инкрементальные и абсолютные.
Резистивные (потенциометрические) датчики углового положения
Резистивные — самый простой по реализации датчик, представляющий из себя поворотный переменный резистор, например такой как на фото ниже:
 Это вариант а-ля Советский Союз, дешево и сердито. Из недостатков — линейность характеристики выходного сигнала мягко говоря, хромает. Точность зависит от наличия помех и качества АЦП, диапазон измеряемого угла в пределах 240-310 градусов. Однако на рынке есть и профессионалльные потенциометрические датчики, в том числе и многооборотные. На фото ниже — потенциометрический датчик Burster 8820.
Это вариант а-ля Советский Союз, дешево и сердито. Из недостатков — линейность характеристики выходного сигнала мягко говоря, хромает. Точность зависит от наличия помех и качества АЦП, диапазон измеряемого угла в пределах 240-310 градусов. Однако на рынке есть и профессионалльные потенциометрические датчики, в том числе и многооборотные. На фото ниже — потенциометрический датчик Burster 8820.

Такие датчики являются профессиональными изделиями — корпус с классом защиты IP 65, нелинейность не более 0,5 %, ресурс 100х10 6 циклов, малый момент реакции, делают возможным применение таких датчиков в весьма ответственных установках. Чувствительный элемент таких датчиков обычно выполняется из износостойкого пластикового резистивного элемента, в качестве контактов ползунка используются многоточечные позолоченные контакты. Температура эксплуатации датчиков 8820 от -55 o С до 100 o С, скорость вращения вала до 600 об/мин. К ограничениям потенциометрических датчиков можно отнести небольшой диапазон угла поворота — обычно до 360 градусов. Хотя имеются и многооборотные датчики, например BOURNS 3590S. Рабочий диапазон этого датчика составляет 10 оборотов, что при цене в районе 4 долларов делает его очень популярным в среде радиолюбителей и электроников. 
Индуктивные датчики углового положения
Индуктивные датчики углового положения в при ближайшем рассмотрении чаще всего оказываются не совсем угловыми. В таких датчиках вращение сначала преобразовывается в линейное перемещение металлического либо ферритового сердечника внутри специально сконструированной катушки индуктивности. Выходной сигнал, снимаемый с выходов катушки, изменяется в зависимости от положения сердечника.
Благодаря простоте изготовления при достаточной точности и высокой надежности, индуктивные датчики получили широкое распространение на территории бывшего Советского союза, и успешно работают на многих российских объектах до сих пор. Это известный любому инженеру КИП старой закалки датчик типа БСПТ-10М (блок сигнализаторов положения токовый):
 Этот датчик выдает нормализованный токовый сигнал 4..20 мА, а также имеет 4 настраиваемых концевых выключателей. Основным недостатком этого датчика является большое время отклика, в связи с чем его нельзя использовать для измерения в случае быстро изменяющейся скорости и направления вращения, так как сигнал будет выдаваться с задержкой.
Этот датчик выдает нормализованный токовый сигнал 4..20 мА, а также имеет 4 настраиваемых концевых выключателей. Основным недостатком этого датчика является большое время отклика, в связи с чем его нельзя использовать для измерения в случае быстро изменяющейся скорости и направления вращения, так как сигнал будет выдаваться с задержкой.
Оптикоэлектронные датчики углового положения (энкодеры)
Оптикоэлектронные датчики углового положения чаще называют энкодерами. Оптикоэлектронный энкодер представляет собой в простейшем случае стеклянный либо пластиковый диск с прозрачными окнами, помещенный между светодиодом и фототранизистором. Это один из самых распространенных датчиков положения в мире — в каждой компьютерной мыши колесико представляет собой именно энкодер.

В зависимости от расположения прорезей и количества фотодатчиков, оптические энкодеры могут быть инкрементальными либо абсолютными. Инкрементальный энкодер не может однозначно определить начальное положение вала, в отличии от абсолютного энкодера — комбинация прорезей, а следовательно комбинация включения фотодатчиков, однозначно определяет положение абсолютного энкодера в любой момент времени.
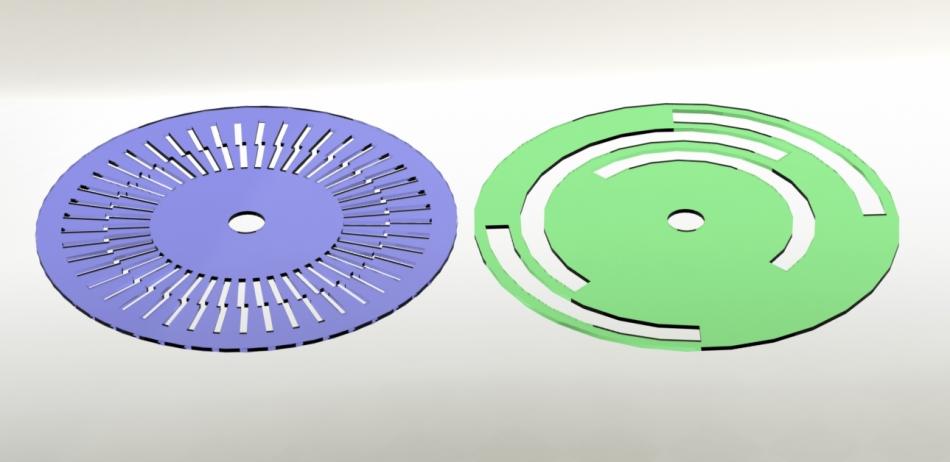
Слева (голубой) диск инкрементального энкодера, 2 фотодатчика и «сдвинутые» прорези позволяют опредеить направление вращения вала. Справа (зеленый) диск абсолютного энкодера. В приведенном примере это 3-х битный абсолютный энкодер, с прорезями на диске соответствующих коду Грея. Абсолютный энкодер позволяет определить точное угловое положение вала в любой момент.
Магнитные энкодеры
Магнитные энкодеры в своей основе имеют датчики Холла. Конструктивно магнитные энкодеры чаще всего бывают двух видов — с использованием магнитного кольца либо с использованием цилиндрического магнита. Энкодеры с использованием магнитного кольца используются в тормозных системах автомобилей в качестве датчика антиблокировочной системы.

В энкодерах с применением цилиндрического магнита используются магниты с диаметральной поляризацией. Ярким примером таких энкодеров являются датчики, построенные на основе специализированных микросхем австрийской компании AMS (Austria MicroSystems). Микросхемы AS представляют собой два датчика Холла, помещенные в одном корпусе и повернутых на 90 градусов относительно друг друга. Магнитные энкодеры AMS обладают высокой точностью (до +-0,5 градуса) и возможностью измерений на высокой скорости вращения — до 30000 оборотов в минуту. В линейке микросхем имеются модели со встроенным счетчиком оборотов, которые при определенных схемотехнических решениях можно использовать в качестве многооборотных абсолютных энкодеров. Также одной из отличительных черт продукции AMS является наличие режимов пониженного и сверхнизкого энергопотребления, что делает продукцию привлекательной для применения в сфере «интернета вещей».
Источник
Магнитные датчики Infineon для измерения скорости и положения

Номенклатура магнитных датчиков Infineon включает в себя дискретные датчики Холла для определения положения объекта или наличия движения, датчики для измерения угла поворота, датчики для измерения линейных перемещений, датчики для измерения скорости и датчики объемного магнитного поля со встроенными микроконтроллерами. Перечисленные датчики предназначены для применения как в автомобилестроении, так и в других отраслях промышленности.
Определение пространственного положения как устройства в целом, так и отдельных его частей, необходимо в охранных системах с контролем состояния окон и дверей, в бесколлекторных двигателях постоянного тока, где алгоритм формирования напряжений основан на информации о положении ротора, во многих бытовых приложениях. Несмотря на разнообразие типов датчиков, позволяющих вводить в электрическую схему информацию о положении того или иного объекта, в последнее время все популярнее становятся устройства, основанные на измерении напряженности внешнего магнитного поля.
Ключевыми преимуществами магнитных датчиков являются компактность, экономичность, а также отсутствие электрических и механических связей между измерительным элементом и контролируемым объектом. А если прибавить к этому высокую чувствительность, линейность, точность и стабильность в широком диапазоне рабочих температур, то становится очевидным, что даже простая замена датчиков других типов, например, оптических или механических, на магнитные положительно скажется на технических и эксплуатационных характеристиках многих приложений.
Учитывая рост спроса, компания Infineon предлагает разработчикам богатый выбор микросхем магнитных датчиков.
Принцип работы магнитных датчиков
В 1879 году Эдвин Холл обнаружил, что при помещении проводника с током в поперечное магнитное поле на его боковых сторонах появляется разность потенциалов, пропорциональная направлению и величине магнитной индукции, что является результатом воздействия силы Лоренца на движущиеся заряды (рисунок 1). До второй половины ХХ века этот эффект не находил практического применения, и только в 1960 году был представлен первый промышленный датчик, основанный на этом физическом явлении. С этого момента магнитные датчики начинают активно использоваться в технике, приобретая все большую популярность.

Рис. 1. Принцип работы датчика Холла
Поскольку сила Лоренца, а следовательно, и ЭДС Холла, напрямую связана с подвижностью зарядов, для повышения чувствительности активный элемент изготавливают из полупроводниковых материалов. Чаще всего используют кремний, однако существуют и приборы с активной зоной из германия, арсенида галлия, фосфида индия и других полупроводников. Форма и геометрические размеры чувствительного элемента зависят от конкретного назначения, поэтому существуют как плоские, так и объемные датчики, причем при производстве плоских элементов хорошо зарекомендовала себя технология вакуумного напыления проводящих слоев на диэлектрическую основу. Несмотря та то, что чувствительность и линейность измерительного элемента напрямую зависят от его размеров, на практике редко применяют датчики с объемом активного проводника больше 1 мм 3 , что делает эти приборы одними из самых миниатюрных.
Однако эффект Холла имеет и ряд недостатков, основными из которых являются относительно малая величина выходного напряжения, не превышающая 1000 мВ/Тл, и температурная нестабильность. Это вынуждает устанавливать операционный усилитель, чаще всего с элементами термокомпенсации, в непосредственной близости от места проведения измерений, поэтому на рынке чаще всего присутствуют готовые решения – микросхемы, содержащие все необходимые для работы узлы и требующие минимального количества внешних компонентов (рисунок 2).

Рис. 2. Структурные схемы простейших магнитных датчиков
Поскольку микросхема магнитного датчика фактически является самостоятельной измерительной системой-на-кристалле, то никто не запрещает производителям электронных компонентов расширять ее возможности, путем добавления различных узлов и модулей, улучшающих как технические характеристики, так и функциональность. Поэтому на рынке присутствуют как простые датчики с аналоговым или дискретным выходом, так и целые измерительные системы с собственными сигнальными процессорами и энергонезависимой памятью для хранения настроек, поддерживающие большинство распространенных интерфейсов передачи данных, в том числе USART, I 2 C и SPI. И, конечно же, в каталогах Infineon имеются специализированные датчики практически для всех стандартных инженерных задач, таких как измерение угла поворота, скорости вращения и многих других.
Дискретные датчики Холла (Switch/Latch Sensors)
Определение наличия или отсутствия какого-либо объекта является, с одной стороны, самой простой, а с другой – самой распространенной задачей. Именно поэтому сфера применения дискретных датчиков простирается от бытовых приборов до серьезных промышленных и автомобильных систем с наивысшим уровнем функциональной безопасности. Этим же объясняется и широкий ассортимент датчиков, предлагаемых компанией Infineon, которые отличаются как по электрическим (чувствительность, гистерезис, тип выхода и так далее), так и по эксплуатационным характеристикам (температурный диапазон, диапазон рабочих напряжений и прочее).
Чаще всего дискретные (одиночные) датчики Холла применяются:
- для определения наличия или отсутствия какого-либо объекта, например, датчик закрытия двери в охранных системах;
- для определения наличия движения, например, датчик скорости вращения вала электродвигателя;
- для определения положения объекта, например, концевые датчики стеклоподъемников автомобилей или датчики положения ручки управления автоматической коробкой передач (рисунок 3).

Рис. 3. Два комплекта (для обеспечения функциональной безопасности) датчиков Холла для определения положения ручки управления АКПП
Принцип работы дискретных магнитных датчиков производства компании Infineon основан на классическом эффекте Холла: чувствительный элемент измеряет величину электромагнитной индукции, в зависимости от которой выход микросхемы переводится в уровень логического нуля либо логической единицы.
Существуют два основных типа датчиков, отличающихся алгоритмом изменения выходного сигнала (рисунок 4). В простых переключателях (Switch) активный уровень выходного сигнала на выходе микросхемы устанавливается, если индукция внешнего магнитного поля превышает определенную величину. При этом для возврата в исходное состояние достаточно, чтобы индукция внешнего поля всего лишь стала меньше порогового значения (с учетом гистерезиса). Полярность магнитного поля при этом может быть как определенной (Unipolar), так и неопределенной (Bipolar). Такие микросхемы идеально подходят для определения наличия или отсутствия каких-либо объектов, например, в концевых датчиках, датчиках открытия/закрытия двери, датчиках положения ротора электродвигателя и прочих.

Рис. 4. Принцип работы дискретных датчиков Холла
В дискретных датчиках с защелкой (Latch) переключение выходного сигнала происходит только при достижении индукцией внешнего магнитного поля определенных пороговых значений, причем уровень выходного сигнала при этом зависит от полярности внешнего поля. Другими словами, после установки на выходе, например, логической единицы датчик вернется в исходное состояние только после того, как внешнее магнитное поле поменяет свою полярность. Такие датчики идеальны для приложений с вращающимися элементами. Например, с помощью дискретного датчика с защелкой можно достаточно легко определить частоту вращения вала электродвигателя.
Отдельно следует отметить микросхемы, содержащие в одном корпусе два датчика Холла (Double Hall Switches), с помощью которых можно определить не только частоту, но и направление вращения вала электродвигателя. Одним из таких приборов является микросхема TLE4966 с двумя выходами (рисунок 5), на которых присутствуют сигналы как о скорости (Speed), так и о направлении (Direction) вращения вала электродвигателя.

Рис. 5. Принцип работы микросхемы TLE4966
Дискретные датчики производства компании Infineon делятся на три большие категории, отличающиеся областью применения. Для автомобильных приложений следует выбирать датчики с префиксом TLE, которые могут работать в диапазоне рабочих температур -40…170°С при напряжении питания 3,0…5,5 В или 3,0…32 В. Аналогичный диапазон питающих напряжений и у датчиков, маркированных префиксом TLI и предназначенных для промышленного использования, однако температурный диапазон у них меньше и составляет -40…125°С. Для остальных потребительских приложений лучше всего выбирать датчики с префиксами TLV, способные работать в диапазоне температур -40…125°С при напряжении питания 3,0…26 В.
Основным семейством дискретных датчиков, предлагаемых компанией Infineon, являются датчики TLx496x (таблица 1), которые могут выпускаться как в потребительском, так и в промышленном и автомобильном исполнениях. Отличительной особенностью данного семейства является широкий диапазон рабочих напряжений, составляющий 3…32 В с возможностью перенапряжения до 42 В, при собственном токе потребления, не превышающем 1,6 мА. Широкий диапазон чувствительности и рабочих температур делает эти датчики идеальными для широкого круга приложений, в том числе и для устройств с высоким уровнем функциональной безопасности: промышленного оборудования, лифтов, электроинструмента, автомобилей и многих других.
Таблица 1. Технические характеристики датчиков семейства TLx496x
| Наименование | Тип | Индукция срабатывания, мТл | Индукция отпускания, мТл | Гистерезис, мТл | Автомо- бильные прило- жения | Промышлен- ные прило- жения | Корпус |
|---|---|---|---|---|---|---|---|
| TLE4961-1M/L | Latch | 2,0 | -2,0 | 4,0 | + | + | SOT23/SSO-3-2 |
| TLE4961-2M | Latch | 5,0 | -5,0 | 10,0 | + | + | SOT23 |
| TLE4961-3M/L | Latch | 7,5 | -7,5 | 15,0 | + | + | SOT23/SSO-3-2 |
| TLE4964-1M | Switch | 18,0 | 12,5 | 5,5 | + | + | SOT23 |
| TLE4964-2M | Switch | 28,0 | 22,5 | 5,5 | + | + | SOT23 |
| TLE4964-3M | Switch | 12,5 | 9,5 | 3,0 | + | + | SOT23 |
| TLE4964-5M | Switch | 7,5 | 5,0 | 2,5 | + | + | SOT23 |
| TLE4968-1M/L | Bipolar | 1,0 | -1,0 | 2,0 | + | + | SOT23/SSO-3-2 |
| TLE4961-5M | Latch | 15,0 | -15,0 | 30,0 | + | + | SOT23 |
| TLE4961-4M | Latch | 10,0 | -10,0 | 20,0 | + | + | SOT23 |
| TLE4964-4M | Switch | 10,0 | 8,5 | 1,5 | + | + | SOT23 |
| TLE4964-6M | Switch | 3,5 | 2,5 | 1,0 | + | + | SOT23 |
| TLV4964-1M | Switch | 18,0 | 12,5 | 5,5 | – | – | SOT23 |
| TLV4964-2M | Switch | 28,0 | 22,5 | 5,5 | – | – | SOT23 |
| TLI4961-1M/L | Latch | 2,0 | -2,0 | 4,0 | – | + | SOT23/SSO-3-2 |
| TLV4961-3M | Latch | 7,5 | -7,0 | 15,0 | – | – | SOT23 |
Для приложений, требующих высокоточного определения позиции контролируемого объекта, компания Infineon рекомендует дискретные датчики семейства TLE/TLI4963/65-xM (таблица 2), отличающиеся малым уровнем джиттера, не превышающим 0,35 мкс. Микросхемы TLE/TLI4963/65-xM рассчитаны на использование в промышленных и индустриальных приложениях и могут работать в диапазоне питающих напряжений в диапазоне 3,0…5,5 В, потребляя при этом ток, не превышающий 1,4 мА.
Таблица 2. Технические характеристики датчиков семейства TLE/TLI4963/65-xM
| Наименование | Тип | Индукция срабатывания, мТл | Индукция отпускания, мТл | Гистерезис, мТл | Автомобильные приложения | Промышленные приложения | Корпус |
|---|---|---|---|---|---|---|---|
| TLE4963-1M | Latch | 2,0 | -2,0 | 4,0 | + | – | SOT23 |
| TLE4963-2M | Latch | 5,0 | -5,0 | 10,0 | + | – | SOT23 |
| TLE4965-5M | Unipolarswitch | 7,5 | 5,0 | 2,5 | + | – | SOT23 |
| TLI4963-1M | Latch | 2,0 | -2,0 | 4,0 | – | + | SOT23 |
| TLI4963-2M | Latch | 5,0 | -5,0 | 10,0 | – | + | SOT23 |
| TLI4965-5M | Unipolarswitch | 7,5 | 5,0 | 2,5 | – | + | SOT23 |
В отличие от предыдущих серий дискретных датчиков, выпускаемых в SMD-корпусах, семейство TLV496x-xTA/B (таблица 3) рассчитано на использование в потребительской технике и выпускается в корпусах, предназначенных для монтажа в отверстия. Микросхемы имеют широкий диапазон рабочий напряжений, составляющий 3…26 В, при токе потребления, не превышающем 1,6 мА.
Таблица 3. Технические характеристики датчиков семейства TLV496x-xTA/B
| Наименование | Тип | Индукция срабатывания, мТл | Индукция отпускания, мТл | Гистерезис, мТл | Корпус |
|---|---|---|---|---|---|
| TLV4961-1TA | Latch | 2,0 | -2,0 | 4,0 | TO92S-3-1 |
| TLV4961-1TB | Latch | 2,0 | -2,0 | 4,0 | TO92S-3-2 |
| TLV4961-3TA | Latch | 7,5 | -7,5 | 15,0 | TO92S-3-1 |
| TLV4961-3TB | Latch | 7,5 | -7,5 | 15,0 | TO92S-3-2 |
| TLV4964-4TA | Unipolarswitch | 10,0 | 8,5 | 1,5 | TO92S-3-1 |
| TLV4964-4TB | Unipolarswitch | 10,0 | 8,5 | 1,5 | TO92S-3-2 |
| TLV4964-5TA | Unipolarswitch | 7,5 | 5,0 | 2,5 | TO92S-3-1 |
| TLV4964-5TB | Unipolarswitch | 7,5 | 5,0 | 2,5 | TO92S-3-2 |
| TLV4968-1TA | Latch | 1,0 | -1,0 | 2,0 | TO92S-3-1 |
| TLV4968-1TB | Latch | 1,0 | -1,0 | 2,0 | TO92S-3-2 |
Для приложений, требующих определения не только скорости, но и направления вращения роторов электродвигателей, предназначены датчики линейки TLE4966 (таблица 4), содержащие в одном корпусе два датчика Холла, расположенных на расстоянии 1,45 мм. Микросхемы TLE4966 удовлетворяют требованиям AEC-Q100 и могут использоваться, в том числе, в автомобильных приложениях.
Таблица 4. Технические характеристики датчиков семейства TLE4966
| Наименование | Тип | Индукция срабатывания, мТл | Индукция отпускания, мТл | Гистерезис, мТл | Корпус |
|---|---|---|---|---|---|
| TLE4966K/L | Double Hall, speed and direction output | 7,5 | -7,5 | 15 | TSOP6/SSO-4-1 |
| TLE4966-2K | Double Hall, two independent outputs | 7,5 | -7,5 | 15 | TSOP6 |
| TLE4966-3K | Double Hall, speed and direction output | 2,5 | -2,5 | 5 | TSOP6 |
| TLE4966V-1K | Vertical double Hall, speed and direction output | 2,5 | -2,5 | 5 | TSOP6 |
Датчики угла поворота (Angle Sensors)
Измерение угла поворота вращающегося объекта необходимо в таких приложениях как электродвигатели, рулевые колонки автомобилей, разнообразное промышленное оборудование, робототехника, мехатронные системы, а также во многих других. От точности и надежности этих приборов во многом зависят как безопасность, так и качество работы большинства автоматизированных систем, поэтому неудивительно, что многие производители электронных компонентов ведут активные поиски новых методов как измерения положения измеряемого объекта, так и обработки полученных результатов.
Первоначально для измерения угла поворота применялись датчики на классическом эффекте Холла с аналоговым выходом, преимуществами которых, помимо традиционных для большинства магнитных приборов компактности и экономичности, являются безынерционность ввиду отсутствия магнитного гистерезиса и возможность работы в широком диапазоне уровней магнитных полей. Однако невысокая точность не позволила их использовать в прецизионных системах и заставила искать новые подходы к проведению измерений. Именно поэтому современные датчики угла поворота практически не используют данный принцип, а вычисляют положение внешнего магнита с помощью более точных методов измерения магнитосопротивления чувствительного элемента.
Одними из первых появились датчики, измеряющие величину анизотропного магнитосопротивления (Anisotropic Magneto Resistance, AMR). Основным отличием их от датчиков Холла является ориентация внешнего магнитного поля, силовые линии которого теперь должны быть направлены не перпендикулярно, а параллельно плоскости свободного (измерительного) слоя (Free Layer, FL), как показано на рисунке 6. Ключевым преимуществом AMR-датчиков является повышенная по сравнению с датчиками Холла чувствительность, а также малый уровень джиттера. Однако для многих прецизионных приложений этой точности все же недостаточно, к тому же AMR-датчики в принципе не способны определить полярность внешнего магнитного поля, из-за чего максимальное значение измеряемого угла ограничено 180°.

Рис. 6. Принцип работы магнитных датчиков для измерения угла поворота
Устранить эти недостатки удалось путем введения дополнительного опорного магнитного слоя (Reference Layer, RL), изолированного от внешнего магнитного поля немагнитным промежутком (Non Magnetic Layer, NML). Это привело к появлению условий для возникновения гигантского магнитосопротивления (Giant Magneto Resistance, GMR) в случае, когда магнитная ориентация свободного слоя, определяемая внешним магнитным полем, оказывается направленной навстречу жестко заданной магнитной ориентации опорного слоя. Датчики на основе гигантского магнитосопротивления отличаются повышенной чувствительностью и способны отследить любое положение внешнего объекта, поскольку их рабочий диапазон измерения угла равен 360°. К недостаткам GMR-датчиков можно отнести ограниченный диапазон индукции внешнего магнитного поля, который для большинства моделей не должен превышать 100 мТл.
Дальнейшие исследования в этой области привели к созданию в 2014 году нового поколения датчиков, в основе работы которых лежит измерение туннельного магнитосопротивления (Tunneling Magneto Resistance, TMR). Структура чувствительных элементов на основе измерения TMR аналогична структуре GMR-приборов и так же содержит два магнитных слоя (свободный и опорный), разделенных туннельным барьером (Tunnel Barrier, TB). Основное отличие этих методов заключается в направлении протекания тока, используемого для измерения сопротивления, который теперь направлен не вдоль, а поперек многослойной структуры.
Ключевым преимуществом датчиков на основе измерения туннельного магнитосопротивления является ультравысокая чувствительность. Выходной сигнал датчиков на основе TMR приблизительно в 20 раз выше, чем у AMR-датчиков и в шесть раз выше, чем у GMR-аналогов. Кроме этого, TMR-датчики отличаются высокой стабильностью, меньшим температурным дрейфом и меньшей скоростью старения.
Для точного определения угла поворота обычно используют восемь чувствительных элементов – магниторезисторов с разной ориентацией магнитных моментов опорных слоев относительно корпусов приборов (рисунок 7). Эти элементы, соединенные в два измерительных моста, под действием внешнего магнитного поля формируют два основных сигнала: синусный и косинусный, являющиеся основной для последующих математических вычислений.

Рис. 7. Принцип измерения угла поворота
Для критически важных приложений с высоким уровнем функциональной безопасности, например, для автомобильной техники, необходимо обязательное дублирование критически важных компонентов. Поскольку датчики угла поворота могут использоваться, например, в системах рулевого управления, отказ которых может привести к неконтролируемому движению транспортного средства и возможным человеческим жертвам, они должны соответствовать требованиям ISO 26262, в том числе и самого жесткого уровня ASIL-D. Этим требованиям полностью отвечают микросхемы, содержащие два независимых датчика, расположенные с двух сторон подложки на расстоянии, не превышающем 600 мкм (рисунок 8). Такое расположение позволяет упростить конструкцию рулевого устройства и формировать два независимых комплекта практически одинаковых сигналов с помощью единственного ферритового магнита, поскольку при столь малом расстоянии между датчиками напряженность измеряемого поля будет практически одинакова.

Рис. 8. Конструкция микросхем с двумя независимыми датчиками, расположенными по обе стороны подложки
Однако такое расположение датчиков внутри микросхемы вовсе не обязательно, поскольку для соответствия требованиям ISO 26262 важно, чтобы датчики и их выходные сигналы были электрически изолированы и независимы. Несмотря на то, что микросхема TLE5501 содержит два одинаковых датчика, смонтированные на одной стороне подложки, она соответствует требованиям ISO 26262, поскольку они электрически никак не связаны между собой (рисунок 9).

Рис. 9. Электрическая схема и пример использования микросхемы TLE5501
Анализируя номенклатуру датчиков угла поворота производства Infineon (таблица 5, рисунок 10), можно отметить, что большинство из них использует технологию GMR, хотя есть и модели с технологией AMR (TLE5109A16), а также одна микросхема (TLE5309D), содержащая два датчика, которые выполнены по разным технологиям (AMR и GMR). Поскольку измерение TMR остается относительно новым подходом в построении датчиков, ассортимент этих приборов пока невелик, однако можно предположить, что именно эта технология в ближайшем будущем станет доминирующей, поскольку требования к точности проведения измерений с каждым годом только растут.

Рис. 10. Номенклатура датчиков угла поворота Infineon
Таблица 5. Технические характеристики датчиков угла поворота Infineon
| Наименование | Технология | Расположение датчиков на подложке | Интерфейс выходов Sin/Cos | Интерфейс аналогового выхода | Дополни- тельные интер- фейсы | Точность | Корпус |
|---|---|---|---|---|---|---|---|
| TLE5009 | GMR | С одной стороны | Аналоговый | – | – | 0,9 | DSO-8 |
| TLE5009A16(D) | GMR | С двух сторон | Аналоговый | – | – | 1,0 | TDSO-16 |
| TLE5011 | GMR | С одной стороны | SSC (SPI) | – | – | 1,6 | DSO-8 |
| TLI5012B | GMR | С одной стороны | SSC (SPI) | SSC (SPI) | PWM/IIF/ SPC/HSM | 1,9 | DSO-8 |
| TLE5012B(D) | GMR | С одной или с двух сторон | SSC (SPI) | SSC (SPI) | PWM/IIF/ SPC/HSM | 1,0 | DSO-8/ TDSO-16 |
| TLE5014C16(D)* | GMR | С одной или с двух сторон | – | SPC | – | 1,0 | TDSO-16 |
| TLE5014P16(D)* | GMR | С одной или с двух сторон | – | PWM | – | 1,0 | TDSO-16 |
| TLE5014S16(D)* | GMR | С одной или с двух сторон | – | SENT | – | 1,0 | TDSO-16 |
| TLE5014SP16(D)* | GMR | С одной или с двух сторон | – | SPI | – | 1,0 | TDSO-16 |
| TLE5109A16(D) | AMR | С одной или с двух сторон | Аналоговый | – | – | 0,5 | TDSO-16 |
| TLE5309D | AMR + GMR | С двух сторон | Аналоговый | SSC (SPI) | – | 0,5 (AMR), 1,0 (GMR) | TDSO-16 |
| TLE5501* | TMR | С одной стороны | Аналоговый | – | – | 1,0 | DSO-8 |
| * – соответствует ISO 26262. | |||||||
Датчики Холла для измерения линейных перемещений (Linear Hall Sensors)
Во многих приложениях возникает задача определения положения объекта, перемещающегося по некоторой траектории, которая совсем не обязательно должна быть прямолинейной. Контролируемым объектом может быть, например, педаль или рулевая колонка автомобиля, дроссельная заслонка топливной системы двигателя внутреннего сгорания (рисунок 11), линейный привод промышленного робота, шток измерителя уровня жидкости и многие другие приложения, содержащие движущиеся части, положение которых может принимать любое значение в некотором ограниченном пространстве.

Рис. 11. Конфигурация магнитного поля магнитного датчика для определения положения дроссельной заслонки двигателя автомобиля
Очевидно, что в подобных приложениях необходимо измерять абсолютное значение магнитного поля, зависящее как от величины индукции внешнего магнита, так и от расстояния между ним и датчиком. А это означает, что данные системы должны иметь возможность калибровки, с помощью которой можно точно учесть все специфические особенности конкретного узла. Именно поэтому большинство линейных датчиков производства компании Infineon (таблица 6) кроме измерительной части содержат узлы для обработки результатов измерений с учетом поправочных коэффициентов, хранящихся во встроенной энергонезависимой памяти (рисунок 12).

Рис. 12. Структурная схема датчиков TLE4998
Таблица 6. Технические характеристики линейных датчиков Infineon
Источник