Датчик угла поворота автомобильного руля
Электронные системы современных автомобилей требуют большого количества данных, считываемых с датчиков, для бесперебойной работы программируемых функций. Одним из важных приборов, дающим информацию для электроусилителя руля, является датчик угла поворота рулевого колеса. Этот элемент системы управления автомобилем играет важную роль для безопасности при эксплуатации транспортного средства.
Измерение угла поворота руля датчиком
Какие виды бывают
В зависимости от производителя, модели автомобиля и года выпуска, применяются несколько типов датчиков, при помощи которых измеряется угол поворота руля, а также сопутствующие величины (скорость и направление поворота):
- Потенциометрического типа. Это простейшее контактное устройство, состоящее из двух потенциометров, расположенных под углом 90ᵒ друг к другу. Обычно устанавливаются на рулевой колонке. Со временем изнашивается, так как имеет подвижные контакты.

- Оптического типа. Это более современный и надежный вариант датчика измерения угла поворота рулевого колеса. В его состав входит специальный кодирующий диск, преобразователи (светодиоды, фоторезисторы) и приемный блок.
- Магниторезистивного типа. Точно определяет угол, направление и скорость поворота. Состоит из корпуса, подвижных магнитных пластин и магниторезисторов. Служит регулятором скорости электродвигателя усилителя руля.



Последний — самый функциональный и современный вид сенсорных устройств, устанавливается на элитные марки автомобилей.
Принцип действия
Рассмотрим потенциометрическую систему. Она самая простая и компактная, не нуждается в электронных элементах в своем составе. Ее преимуществом является устойчивость к электромагнитным помехам. Работа прибора основана на пропорциональном изменении сопротивления датчика при различных углах поворота руля. Два переменных резистора, при повороте руля водителем, изменяют свое сопротивление, что фиксируется приемным электронным блоком.

Недостатком данных датчиков является изнашиваемость движущихся элементов.
В оптических сенсорах, применяют источник света в виде светодиодов, который попадает на фоторезисторы некоторыми импульсами через специально размеченный диск. При вращении рулевой колонки, срабатывает датчик угла поворота руля — фоторезисторы уменьшают свое сопротивление при попадании на них света, и наоборот. Диск состоит из внутренней и наружной плоскостей. Каждая из них предназначена для подачи светового сигнала, дающего информацию о разных параметрах — угле поворота и направлении движения руля.

К недостаткам системы относится отсутствие универсальности измерения. Такой параметр, как угловая скорость вращения недоступен. Для его регистрации применяются магниторезистивные элементы.
В магниторезистивном датчике поворота и измерения скорости движения рулевого колеса имеются движущиеся магниты. Они вращаются относительно неподвижных магниторезисторов, закрепленных в корпусе, при помощи зубчатых колес с определенным числом зубьев. Во время вращения магнитов происходит изменение магнитного поля, что влечет за собой изменение сопротивления резисторов.

В данный момент, магнитные приборы самые востребованные в России, а также на мировом рынке автомобилестроения, так как они достаточно точно помогают в регулировке работы электропривода руля.
Основные признаки неисправности
Иногда сенсоры устанавливают на рейку рулевой колонки, что увеличивает количество попадаемой пыли. Данное обстоятельство приводит к отказу электронной части датчика. Механическая часть подвергается коррозии.
О неисправности системы сигнализирует желтый либо красный свет на приборном табло. Водитель может почувствовать одностороннее усиление руля при поворотах или более слабое на одну из сторон. Явно почувствовать сбой можно, если вращение происходит очень туго, рывками.
Видео по теме
Источник
Датчик положения рулевого колеса
Датчик положения рулевого колеса вырабатывает сигналы, пропорциональные углу и направлению поворота рулевого колеса. Хотя существуют различные аналоговые датчики, ниже мы опишем датчик цифрового типа, использующий так называемый фотопрерыватель.
Фотопрерыватель представляет собой полупроводниковый прибор, содержащий пару из светоизлучающего диода и фототранзистора. В зависимости от наличия или отсутствия излучения светодиода фототранзистор открыт или закрыт.
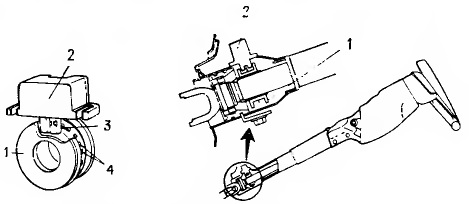
Рис. Датчик положения рулевого колеса: 1 — диск рулевого управления; 2 — корпус датчика; 3 — фотопрерыватель; 4 — прорези.
Датчик положения рулевого колеса содержит, как показано на рисунке, фотопрерыватель и диск с прорезями, который помещается между светодиодом и фототранзистором фотопрерывателя. Фотопрерыватель устанавливается на рулевой колонке, а диск — на валу рулевого колеса. При повороте рулевого колеса диск вращается, и фототранзистор попеременно открывается и закрывается (переходит в состояние пропускания тока или отсечки). В результате появляется цифровой сигнал, содержащий информацию об угле поворота рулевого колеса. Однако при использовании только одного фотопрерывателя сигналы поворота влево и вправо оказываются одинаковыми, поэтому для обнаружения направления необходимы два фотопрерывателя. Направление определяется при этом по разности фаз сигналов фотопрерывателей. На рисунке показаны электрическая схема датчика и формы сигналов на выводах S1 и S2 схемы. Описанный датчик имеет 20 прорезей, что соответствует углу в 18′.
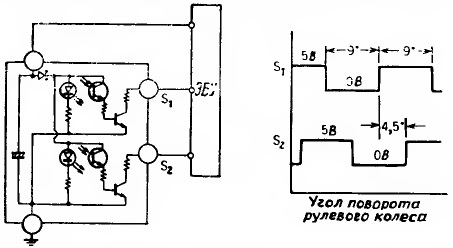
Рис. Схема датчика положения рулевого колеса и его сигналы
Источник
Датчики электрического усилителя рулевого управления

Как правило, в современных легковых автомобилях все чаще применяют электрический усилитель рулевого управления. В интернете и специализированной литературе довольно подробно написано, для чего он нужен и как устроен. Для автолюбителя и работника автосервиса (любящего свою работу) уровень такого предоставленного материала иногда вполне достаточен.

Но для инженера или разработчика, к сожалению, он довольно скуден и поверхностен, а иногда и не совсем точен. На примере одной конструкции, весьма уважаемого производителя, попробую изложить дополнительную информацию, которую я получил при разборке данного устройства. Касается это в основном датчиков, определяющих работу данного устройства, и пример реализации их подключения. Возможно, это будет полезно, хотя бы студентам и инженерам. Для людей, профессионально занимающимся разработкой автомобилей это изложение покажется, наверное, смешным.
Итак, есть такой узел, один вал (назовем выходной) которого управляет углом поворота передних колес, а к другому противоположному валу (назовем входной вал) прикреплен руль. К рулю (рулевому колесу) прилагает усилие тело своими руками, (стандартным весом по ГОСТу 75кг, имеющее право на управление автомобилем, и совершающее обдуманные законопослушные действия) в надежде изменить угол поворота колес. При этом на каждое это колесо приходится часть веса автомобиля, и довольно таки существенное (300 — 600 кг), и при диаметре рулевого колеса, не превышающем полметра, усилие, которое надо прилагать к рулю, на неподвижном автомобиле, без дополнительного усилителя, очень чрезмерно для большинства, по мнению медиков, здоровых людей.
Для облегчения усилия, требуемого прилагать к рулевому колесу, ставят электромотор, который прилагает дополнительное усилие к выходному валу. Какое дополнительное усилие, и в какую сторону надо прилагать электромотору, определят электронный блок усилителя рулевого управления, с помощью датчика усилия, которое прилагает водитель к рулевому колесу. Датчик этот расположен, как правило, в месте соединения выходного и входного вала. А соединяются эти валы между собой с помощью гибкого элемента (как правило, торсиона, параметры которого имеют заданные значения), который гибко деформируется (закручивается) в ту или иную сторону, на угол, пропорционально по степени прилагаемого усилия между рулевым колесом, и силой сопротивления передних колес автомобиля их повороту. Электромотор применяют, как правило, теперь бес коллекторный, трехфазный. Для управления вращением электромотором требуется схема, формирующая из постоянного тока бортовой сети переменное напряжение из трех фаз. Контролировать правильное вращение электромотора, помогает еще один датчик – датчик вращения и угла поворота его оси. Сигналы с этих датчиков, и поступают электронный блок усилителя рулевого управления. Внутри которого также находится схема управления электромотором. Сам это блок связан внутренней сетью управления с другими электронными блоками автомобиля.
Электронная начинка этого блока содержит довольно таки производительный микроконтроллер (примерно уровня STM32F4xx и даже выше), контроллер управления трехфазным мотором, цепи предотвращения работы и отключения электрических цепей при возникновении нештатной работы или внутренней неисправности.
Наверное, вы уже устали читать, приступим к разборке (фотографии простые, извиняюсь за качество). Я буду применять иногда свои выдуманные названия к предметам, извините и поправьте если что.
Датчик усилия (далее ДУ), представляет собой систему из:
— Кольцевого многополюсного магнита (далее КМ), напрессованного на входной вал.
— Кольцевого селектора (далее КС) магнитного поля, напрессованного на выходной вал. Он состоит и пластикового цилиндрического корпуса, с двумя магнитопроводящими кольцами, которые имеют клювообразные элементы, на стороне, обращенной к КМ. Эти клювообразные элементы соответствуют количеству и положению магнитных полюсов на КМ.
— Датчика магнитного поля (далее ДМ), закрепленного уже на неподвижном корпусе усилителя рулевого управления, и состоящего из двух магнитопроводящих полуколец, передающих магнитное поле от КС к двум датчикам холла.
Начну иллюстрации: 
Так выглядят еще не разъединённые входной и выходной вал:

Вынимаем шпильку и разъединяем: (Кольцевой трансформатор=кольцевой селектор)


Напрессованный КС, КМ, видны пазы входного и выходного вала, ограничивающие угол закручивания торсиона, и даже если он сломается, рулевое управление будет сохранено. Задача торсиона, не передавать весь крутящий момент, а только его измерить:

Слева — корпус ДМ, справа — КС.

Датчики холла (их два, тип мне неизвестен):

А так весь механизм выложен последовательно, все снято со своих мест:

Как возможно это работает:
В собранной конструкции, пока нет деформации торсиона, Полюса КМ расположены напротив клювообразных отводов двух магнитопроводящих колец КС в определенном положении. Наводимые магнитные поля через двух кольцевой приемник ДМ подводится к своему соответствующему датчику холла. И в этом состоянии магнитные поля, приводимые к датчикам холла одинаковы.
При деформации торсиона, вследствие приложения усилия к рулевому колесу, положение КМ относительно клювообразных отводов КС меняется, и на двух магнитопроводящих кольцах КС создается разность магнитного поля. Которое подводится с помощью двух колец ДМ к датчикам холла. С двух датчиков холла, с их выходов, получается дифференциальное напряжение, прямо пропорциональное деформации торсиона, и соответственно, усилию на рулевом колесе. Но иногда может потребоваться калибровка показаний датчиков, что предусмотрено.
Что можно увидеть на экране осциллографа?
КМ и КС расположены без смещения относительно друг друга:

Сигналы на выходах датчиков одинаковы:

Смещение в КМ относительно КС одну сторону:

Сигнал (один увеличивается, другой на столько же уменьшается):




В идеале, сигнал на выходе датчиков должен иметь такую характеристику:

Чрезмерно деформировать торсион, сломать его, не дают соответствующие пазы входного и выходного вала, находящиеся в определенном взаимном положении.
Иногда, “разводят”, или неправильно ставят диагноз некоторые «спецы», резко вращая рулевое колесо из стороны в сторону, на заглушенном автомобиле. При этом из рулевой колонки доносится отчетливый стук, который пытаются выдать за проявление неисправности. А на самом деле звук этот и издают пазы при соударении, так как компенсировать деформацию торсиона при неработающем двигателе некому (не работает двигатель – зачем тебе и электроусилитель руля). В “гаражах” иногда работают вполне грамотные и опытные люди, но чек и квитанция это дополнительный страховой полис, мало ли. Не экономьте на правильном диагнозе. То же самое происходит и в работе золотника (гидравлического распределителя) гидравлического усилителя руля.
Электромотор, три фазы, магнитный ротор имеет четыре полюса:


Выходной вал электромотора, проходит через датчик вращения:

Датчик вращения электромотора приподнят, видно эксцентрик на валу (часть вращающегося трансформатора):

Датчик вращения и положения оси электродвигателя усилителя рулевого управления,
называют его еще вращающимся трансформатором (далее ВТ), или ресольвером. В том месте, где расположен этот датчик, на оси электромотора имеется эксцентрик. Который при вращении, меняет расположение магнитного поля между полюсами трансформатора. Как взаимно расположены обмотки на полюсах, смотрите на рисунке далее (не указал фазировку, простите).
В данном случае, ВТ имеет три обмотки, на одну подается опорное синусоидальное напряжение, а с двух других снимается синусоидальное напряжение, пропорциональное углу поворота оси электромотора. Для примера, подаем напряжение синусоидальной формы на обмотку “возбуждения” со звуковой карты компьютера, а с двух других обмоток будем снимать показания осциллографом. Эксцентриком будет служить простой металлический винт. Думаю картинки красноречивы и комментировать каждую не имеет смысла. Но рассматривая экран осциллографа, надо проявлять немного фантазии, ибо смотрим два канала, а синхронизация только по одному. Иногда один луч кажется двоится.
С разобранным корпусом для наглядности;


При отсутствии эксцентрика внутри ВТ


Вставляем имитатор эксцентрика и начинаем его крутить, и смотрим сигналы:












Не стал заморачиваться с анимацией, думаю и так понятно. Имея два таких сигнала, измеряя их амплитуду и фазу, можно с достаточной точностью и надежностью определять положение оси электродвигателя. Ну и для завершения, так примерно организованы входные и выходные цепи электронного блока усилителя руля (тестер и мои личные фантазии):

Все сигналы поступают для обработки в микроконтроллер на аналоговые входы. Выход TSY — напряжение питания датчиков холла. Магнитные датчики не так склонны к запотеванию и наличию грязи, как оптические, терпимы к высоким и низким температурам.
Но и лепить где попало неодимовые магниты в машине и дома, тоже не стоит. К тому же они могут привести к вреду здоровья при неправильном использовании.
С уважением, Астанин Сергей.
Готов к вопросам и комментариям тут.
Будем продолжать в таком духе и разбирать автоматические коробки передач и вариаторы тут :)?
Источник