Унифицированные аналоговые сигналы в системах автоматики
При автоматизации технологических процессов используются различные датчики и исполнительные устройства. И те и другие так или иначе связаны с контроллерами или модулями ввода/вывода, которые получают от датчиков измеренные значения физических параметров и управляют исполнительными устройствами.
Представьте, что все устройства, присоединяемые к контроллеру имели бы различные интерфейсы — тогда производителям пришлось бы «плодить» огромное количество модулей ввода-вывода, а для того, чтобы заменить, например, неисправный датчик, нужно было бы искать точно такой же.
Именно поэтому, в системах промышленной автоматики принято унифицировать интерфейсы различных устройств.
В этой статье мы расскажем об унифицированных аналоговых сигналах. Поехали!
Унифицированные аналоговые сигналы
С аналоговыми сигналами мы имеем дело при измерении любых физических величин (температуры, влажности, давления и т.д.), а так же при непрерывном управлении исполнительными устройствами (регулирование скорости вращения двигателя с помощью преобразователя частоты; управление температурой с помощью нагревателя и т.д.).
Во всех перечисленных и им подобных случаях используются аналоговые (непрерывные) сигналы.
В контроллерном оборудовании в подавляющем большинстве случаев используются два типа аналоговых сигналов: токовый 4-20 мА и сигнал напряжения 0-10 В.
Унифицированный сигнал напряжения 0-10 В
При использовании этого типа сигнала для получения информации с датчика весь его (датчика) диапазон делится на диапазон напряжения 0-10 В. Например, датчик температуры имеет диапазоны -10…+70 °С. Тогда при -10 °С на выходе датчика будет 0 В, а при +70 °С — 10 В. Все промежуточные значения находятся из пропорции.
Это же верно для любого другого устройства. Например, если аналоговый выход частотного преобразователя настроен на передачу текущей скорости вращения двигателя — тогда 0 В у него на выходе означает, что двигатель остановлен, а 10 В, что двигатель крутится на максимальной частоте.
Управление сигналом 0-10 В
С помощью унифицированного сигнала напряжения можно не только получать данные о физических величинах, но и управлять устройствами. Например, можно привести трёхходовой клапан в нужное положение, изменить скорость вращения электродвигателя через частотный преобразователь или мощность нагревателя.
Возьмём для примера электродвигатель, частотой вращения которого управляет частотный преобразователь.

Частоту вращения двигателя задаёт контроллер сигналом 0-10 В, приходящим на аналоговый вход частотника.Частота вращения двигателя двигателя может быть от 0 до 50 Гц. Тогда, если в соответствии с алгоритмом контроллер собирается раскрутить двигатель на 25 Гц, он должен подать на вход частотника 5В.
«Токовая петля»: унифицированный аналоговый сигнал 4-20 мА
Аналоговый сигнал 4-20 мА (ещё называют «токовая петля») так же как сигнал напряжения 0-10 В используется в автоматике для получения информации от датчиков и управления различными устройствами.
По сравнению с сигналом 0-10 В сигнал 4-20 мА имеет ряд преимуществ:
- Во-первых, токовый сигнал можно передать на большие расстояния в сравнении с сигналом 0-10 В, в котором происходит падение напряжения на длинной линии, обусловленное сопротивлением проводников.
- Во-вторых, легко диагностировать обрыв линии, т.к. рабочий диапазон сигнала начинается от 4 мА. Поэтому если на входе 0 мА — значит на линии обрыв.
Управление сигналом 4-20 мА
Управление различными устройствами с помощью токового сигнала ничем не отличается от управления с помощью сигнала напряжения. Только в данном случае нужен уже источник не напряжения, а тока.
Если устройство имеет управляющий вход 4-20 мА, то таким устройством может управлять контроллер или другое интеллектуальное устройство, имеющее соответствующий выход.
Например, мы хотим плавно открывать вентиль, имеющий электропривод со входом 4-20 мА. Если подать на вход сигнал тока 4 мА, тогда вентиль будет полностью закрыт, а если подать 20 мА — полностью открыт.
Активный и пассивный аналоговый выход 4-20 мА
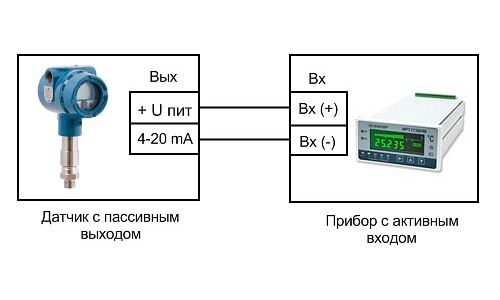
Зачастую аналоговый выход датчика, контроллера или другого устройства — пассивный, то есть не может являться источником тока без внешнего питания. Поэтому при проектировании схемы автоматики нужно внимательно изучить характеристики аналоговых выходов используемых устройств, и если они пассивные — добавить в схему внешний источник питания для пропитки токовой петли.

На рисунке представлена схема подключения датчика с выходом 4-20 мА к измерителю-регулятору с соответствующим входом. Поскольку выход датчика пассивный — требуется его пропитка внешним блоком питания.
Нормирующий преобразователь
 При измерении физической величины (температуры, влажности, загазованности, pH и др.) датчики преобразуют её значение в ток, напряжение, сопротивление, ёмкость и т.д. (в зависимости от принципа работы датчика). Для того, чтобы привести выходной сигнал датчика к унифицированному сигналу используют нормирующие преобразователи.
При измерении физической величины (температуры, влажности, загазованности, pH и др.) датчики преобразуют её значение в ток, напряжение, сопротивление, ёмкость и т.д. (в зависимости от принципа работы датчика). Для того, чтобы привести выходной сигнал датчика к унифицированному сигналу используют нормирующие преобразователи.

Нормирующий преобразователь — устройство, приводящее сигнал первичного преобразователя к унифицированному сигналу тока или напряжения.
Так выглядит датчик температуры с нормирующим преобразователем:
Источник
Подключение датчиков с токовым выходом к вторичным приборам
Получившие наибольшее распространение в сфере автоматизации производства датчики с унифицированным токовым выходом 4-20, 0-50 или 0-20 мА могут иметь различные схемы подключения к вторичным приборам. Современные датчики, имеющие низкое энергопотребление и токовый выход 4-20 мА, чаще всего подключают по двухпроводной схеме. То есть к такому датчику подключается всего один кабель с двумя жилами, по которым этот датчик запитывается, и по этим же двум жилам осуществляется передача выходного сигнала 4-20 мА.
Как правило, датчики с выходом 4-20 мА и двухпроводной схемой подключения имеют пассивный выход и им для работы необходим внешний источник питания. Этот источник питания может быть встроен непосредственно во вторичный прибор (в его вход) и при подключении датчика к такому прибору в сигнальной цепи сразу появляется ток. О приборах, которые имеют встроенный во вход источник питания для датчика, говорят, что это приборы с активным входом.
Большинство современных вторичных приборов и контроллеров имеет встроенные источники питания для работы с датчиками с пассивными выходами.
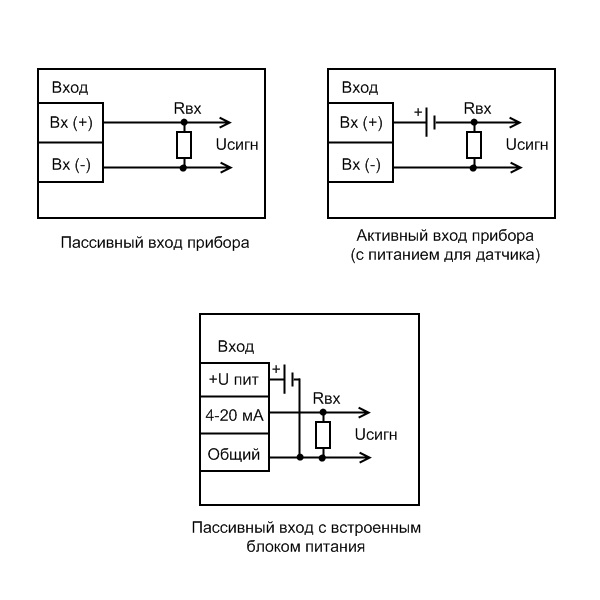
Если же вторичный прибор имеет пассивный вход — по сути, просто резистор, с которого измерительная схема прибора «считывает» падение напряжения, пропорциональное протекающему в цепи току, то для работы датчика необходим дополнительный внешний блок питания. Внешний блок питания в этом случае включается последовательно с датчиком и вторичным прибором в разрыв токовой петли.

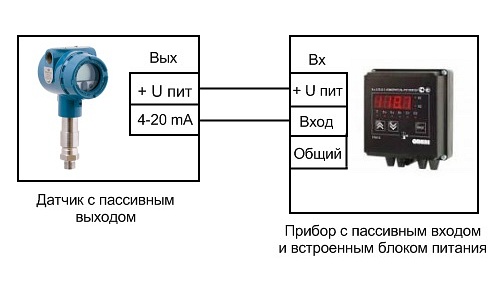
Вторичные приборы обычно проектируются и выпускаются с таким расчетом, чтобы к ним можно было подключить как двухпроводные датчики 4-20 мА, так и датчики 0-5, 0-20 или 4-20 мА, подключаемые по трехпроводной схеме. Для подключения двухпроводного датчика к входу вторичного прибора с тремя входными клеммами (+U, вход и общий) задействуют клеммы «+U» и «вход», клемма «общий» остается свободной.
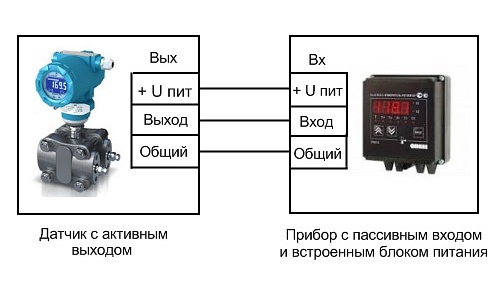
Так как датчики, как уже было сказано выше, могут иметь не только выход 4-20 мА, а, например, 0-5 или 0-20 мА или их невозможно подключить по двухпроводной схеме из-за большого собственного энергопотребления (более 3 мА), то применяют трехпроводную схему подключения. В этом случае цепи питания датчика и цепи выходного сигнала разделены. Датчики имеющие трехпроводную схему подключения обычно имеют активный выход. То есть, если подать на датчик с активным выходом напряжение питания и между его выходными клеммами «выход» и «общий» подключить нагрузочное сопротивление, то в выходной цепи побежит ток, пропорциональный величине измеряемого параметра.
Вторичные приборы обычно имеют достаточно маломощный встроенный блок питания для запитки датчиков. Максимальный выходной ток встроенных блоков питания обычно находиться в пределах 22-50 мА, чего не всегда достаточно для питания датчиков имеющих большое энергопотребление: электромагнитных расходомеров, инфракрасных газоанализаторов и т.п. В этом случае для питания трехпроводного датчика приходиться использовать внешний, более мощный блок питания, обеспечивающий необходимую мощность. Встроенный во вторичный прибор источник питания при этом не используется.

Подобная схема включения трехпроводных датчиков обычно используется и в том случае, когда напряжение встроенного в прибор источника питания не соответствует тому напряжению питания, которое допускается подавать на этот датчик. Например, встроенный источник питания имеет выходное напряжение 24В, а датчик разрешается питать напряжением от 10 до 16В.
Некоторые вторичные приборы могут иметь несколько входных каналов и достаточно мощный блок питания для запитки внешних датчиков. Необходимо помнить, что суммарная потребляемая мощность всех подключенных к такому многоканальному прибору датчиков должна быть меньше мощности встроенного источника питания, предназначенного для их питания. Кроме того, изучая технические характеристики прибора необходимо четко различать назначение встроенных в него блоков (источников) питания. Один встроенный источник используется для питания непосредственно самого вторичного прибора — для работы дисплея и индикаторов, выходных реле, электронной схемы прибора и т.п. Этот источник питания может иметь достаточно большую мощность. Второй встроенный источник используется для запитки исключительно входных цепей — подключенных к входам датчиков.
Перед подключением датчика к вторичному прибору следует внимательно изучить руководства по эксплуатации на данное оборудование, определить типы входов и выходов (активный/пассивный), проверить соответствие потребляемой датчиком мощности и мощности источника питания (встроенного или внешнего) и только после этого производить подключение. Реальные обозначения входных и выходных клемм датчиков и приборов могут отличаться от тех, что приведены выше. Так клеммы «Вх (+)» и «Вх (-)» могут иметь обозначение +J и -J, +4-20 и -4-20, +In и -In и т.п. Клемма «+U пит» может быть обозначена как +V, Supply, +24V и т.п., клемма «Выход» — Out, Sign, Jout, 4-20 mA и т.п., клемма «общий» — GND, -24V, 0V и т.п., но смысла это не меняет.
Датчики с токовым выходом имеющие четырехпроводную схему подключения имеют аналогичную схему подключения, что и двухпроводные датчики с той лишь разницей, что питание четырепроводных датчиков осуществляется по отдельной паре проводов. Кроме того, четырехпроводные датчики могут иметь как активный, так и пассивный выход, что необходимо учитывать при выборе схемы подключения.
Источник
Аналоговые датчики: применение, способы подключения к контроллеру
 В процессе автоматизации технологических процессов для управления механизмами и агрегатами приходится сталкиваться с измерениями различных физических величин. Это может быть температура, давление и расход жидкости или газа, частота вращения, сила света информация о положении частей механизмов и многое другое. Эта информация получается с помощью датчиков. Вот, сначала о положении частей механизмов.
В процессе автоматизации технологических процессов для управления механизмами и агрегатами приходится сталкиваться с измерениями различных физических величин. Это может быть температура, давление и расход жидкости или газа, частота вращения, сила света информация о положении частей механизмов и многое другое. Эта информация получается с помощью датчиков. Вот, сначала о положении частей механизмов.
Дискретные датчики
Самый простой датчик – обычный механический контакт: дверь открыли – контакт разомкнулся, закрыли – замкнулся. Такой нехитрый датчик, равно как и приведенный алгоритм работы, часто применяется в охранных сигнализациях. Для механизма с поступательным движением, который имеет два положения, например водопроводная задвижка, понадобится уже два контакта: замкнулся один контакт – задвижка закрыта, замкнулся другой – закрыта.
Более сложный алгоритм поступательного движения имеет механизм закрытия прессформы термопласт автомата. Изначально прессформа открыта, это исходное положение. В этом положении из прессформы извлекаются готовые изделия. Далее рабочий закрывает защитное ограждение и прессформа начинает закрываться, начинается новый рабочий цикл.
Расстояние между половинами прессформы достаточно велико. Поэтому сначала прессформа движется быстро, а на некотором расстоянии до смыкания половин, срабатывает концевик, скорость движения значительно уменьшается и прессформа плавно закрывается.
Такой алгоритм позволяет избежать удара при смыкании прессформы, иначе ее просто можно расколотить на мелкие кусочки. Такое же изменение скорости происходит и при открывании прессформы. Здесь уже двумя контактными датчиками не обойтись.
Таким образом, датчики на основе контакта являются дискретными или бинарными, имеют два положения, замкнут – разомкнут или 1 и 0. Другими словами можно сказать, что событие произошло или нет. В приведенном выше примере, контактами «улавливаются» несколько точек: начало движения, точка снижения скорости, конец движения.
В геометрии точка не имеет никаких размеров, просто точка и все. Она может либо быть (на листе бумаги, в траектории движения, как в нашем случае) или ее попросту нет. Поэтому для обнаружения точек применяются именно дискретные датчики. Может быть сравнение с точкой здесь не очень уместно, ведь в практических целях пользуются величиной точности срабатывания дискретного датчика, а точность эта намного больше геометрической точки.
Но сам по себе механический контакт вещь ненадежная. Поэтому везде, где это возможно, механические контакты заменяются бесконтактными датчиками. Самый простой вариант это герконы: магнит приблизился, контакт замкнулся. Точность срабатывания геркона оставляет желать лучшего, применять такие датчики как раз только для определения положения дверей.
Более сложным и точным вариантом следует считать различные бесконтактные датчики. Если металлический флажок вошел в прорезь, то датчик сработал. В качестве примера таких датчиков можно привести датчики БВК (Бесконтактный Выключатель Конечный) различных серий. Точность срабатывания (дифференциал хода) таких датчиков 3 миллиметра.

Рисунок 1. Датчик серии БВК
Напряжение питания датчиков БВК 24В, ток нагрузки 200мА, что вполне достаточно для подключения промежуточных реле для дальнейшего согласования со схемой управления. Именно так используются датчики БВК в различном оборудовании.
Кроме датчиков БВК применяются также датчики типов БТП, КВП, ПИП, КВД, ПИЩ. Каждая серия имеет несколько типов датчиков, обозначаемых цифрами, например, БТП-101, БТП-102, БТП-103, БТП-211.
Все упомянутые датчики являются бесконтактными дискретными, их основное назначение определение положения частей механизмов и агрегатов. Естественно, что этих датчиков намного больше, обо всех в одной статье не написать. Еще более распространены и до сих пор находят широкое применение различные контактные датчики.
Применение аналоговых датчиков
Кроме дискретных датчиков в системах автоматизации широкое применение находят аналоговые датчики. Их назначение – получение информации о различных физических величинах, причем не, просто так вообще, а в реальном масштабе времени. Точнее преобразование физической величины (давление, температура, освещенность, расход, напряжение, ток) в электрический сигнал пригодный для передачи по линиям связи в контроллер и дальнейшая его обработка.
Аналоговые датчики располагаются, как правило, достаточно далеко от контроллера, отчего часто их называют полевыми устройствами. Этот термин часто применяется в технической литературе.
Аналоговый датчик, как правило, состоит из нескольких частей. Самая главная часть это чувствительный элемент – сенсор. Его назначение перевести измеряемую величину в электрический сигнал. Но сигнал, получаемый от сенсора, как правило, невелик. Для получения сигнала, пригодного для усиления, сенсор чаще всего включается в мостовую схему – мостик Уитстона.
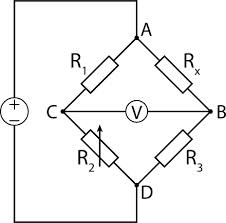
Рисунок 2. Мостик Уитстона
Изначальное назначение мостовой схемы — точное измерение сопротивления. К диагонали моста AD подключается источник постоянного тока. В другую диагональ подключен чувствительный гальванометр со средней точкой, с нулем в середине шкалы. Для измерения сопротивления резистора Rx вращением подстроечного резистора R2 следует добиться равновесия моста, установить стрелку гальванометра на нулевое значение.
Отклонение стрелки прибора в ту или иную сторону позволяет определить направление вращения резистора R2. Величина измеряемого сопротивления определяется по шкале, совмещенной с ручкой резистора R2. Условием равновесия моста является равенство соотношений R1/R2 и Rx/R3. В этом случае между точками BC получается нулевая разность потенциалов, и ток через гальванометр V не протекает.
Сопротивление резисторов R1 и R3 подобрано очень точно, их разброс должен быть минимален. Только в этом случае даже небольшой разбаланс моста вызывает достаточно заметное изменение напряжения диагонали BC. Именно это свойство моста используется для подключения чувствительных элементов (сенсоров) различных аналоговых датчиков. Ну, а дальше все просто, дело техники.
Для использования сигнала, полученного с сенсора, требуется его дальнейшая обработка, — усиление и преобразование в выходной сигнал, пригодный для передачи и обработки схемой управления — контроллером. Чаще всего выходным сигналом аналоговых датчиков является ток (аналоговая токовая петля), реже напряжение.
Почему именно ток? Дело в том, что выходные каскады аналоговых датчиков построены на базе источников тока. Это позволяет избавиться от влияния на выходной сигнал сопротивления соединительных линий, пользоваться соединительными линиями большой длины.
Дальнейшее преобразование достаточно просто. Токовый сигнал преобразуется в напряжение, для чего достаточно ток пропустить через резистор известного сопротивления. Падение напряжения на измерительном резисторе получается по закону Ома U=I*R.
Например, для тока 10 мА на резисторе сопротивлением 100Ом получится напряжение 10*100=1000мВ, аж прямо целый 1 вольт! При этом выходной ток датчика не зависит от сопротивления соединительных проводов. В разумных, конечно, пределах.
Подключение аналоговых датчиков
Полученное на измерительном резисторе напряжение легко преобразовать в цифровой вид, пригодный для ввода в контроллер. Преобразование выполняется с помощью аналого-цифровых преобразователей АЦП.
Цифровые данные в контроллер передаются последовательным или параллельным кодом. Все зависит от конкретной схемы включения. Упрощенная схема подключения аналогового датчика показана на рисунке 3.

Рисунок 3. Подключение аналогового датчика (чтобы увеличить нажмите на картинку)
К контроллеру подключаются исполнительные механизмы, либо сам контроллер подключается к компьютеру, входящему в систему автоматизации.
Естественно, что аналоговые датчики имеют законченную конструкцию, одним из элементов которой является корпус с присоединительными элементами. В качестве примера на рисунке 4 показан внешний вид датчика избыточного давления типа Зонд-10.

Рисунок 4. Датчик избыточного давления Зонд-10
В нижней части датчика можно видеть присоединительную резьбу для подключения к трубопроводу, а справа под черной крышкой находится разъем для подключения линии связи с контроллером.
Герметизация резьбового соединения производится с помощью шайбы из отожженной меди (входит в комплект поставки датчика), а отнюдь не подмоткой из фум-ленты или льна. Делается это для того, чтобы при установке датчика не деформировать расположенный внутри сенсорный элемент.
Выходные сигналы аналоговых датчиков
Согласно стандартам существует три диапазона токовых сигналов: 0…5мА, 0…20мА и 4…20мА. В чем их отличие, и какие особенности?
Чаще всего зависимость выходного тока прямо пропорциональна измеряемой величине, например, чем выше давление в трубе, тем больше ток на выходе датчика. Хотя иногда применяется инверсное включение: большей величине выходного тока соответствует минимальное значение измеряемой величины на выходе датчика. Все зависит от типа применяемого контроллера. Некоторые датчики имеют даже переключение с прямого на инверсный сигнал.
Выходной сигнал диапазона 0…5мА весьма мал, и поэтому подвержен действию помех. Если сигнал такого датчика колеблется при неизменном значении измеряемого параметра, то есть рекомендации параллельно выходу датчика установить конденсатор емкостью 0.1…1мкФ. Более устойчивым является токовый сигнал в диапазоне 0…20мА.
Но оба этих диапазона нехороши тем, что ноль в начале шкалы не позволяет однозначно определить, что же произошло. Или измеряемый сигнал на самом деле принял нулевой уровень, что в принципе возможно, или просто оборвалась линия связи? Поэтому от использования этих диапазонов стараются, по возможности, отказаться.
Более надежным считается сигнал аналоговых датчиков с выходным током в диапазоне 4…20мА. Помехозащищенность его достаточно высокая, а нижний предел, даже если измеряемый сигнал имеет нулевой уровень, будет 4мА, что позволяет говорить о том, что линия связи не оборвана.
Еще одной хорошей особенностью диапазона 4…20мА является то, что датчики можно подключать всего по двум проводам, поскольку именно таким током питается сам датчик. Это его ток потребления и одновременно измерительный сигнал.
Источник питания датчиков диапазона 4…20мА включается, как показано на рисунке 5. При этом датчики Зонд-10, как и многие другие, по паспорту имеют широкий диапазон напряжения питания 10…38В, хотя чаще всего применяются стабилизированные источники с напряжением 24В.
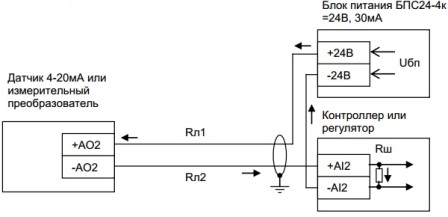
Рисунок 5. Подключение аналогового датчика с внешним источником питания
На этой схеме присутствуют следующие элементы и обозначения. Rш – резистор измерительного шунта, Rл1 и Rл2 – сопротивления линий связи. Для повышения точности измерения в качестве Rш должен использоваться прецизионный измерительный резистор. Прохождение тока от источника питания показано стрелками.
Нетрудно видеть, что выходной ток источника питания проходит с клеммы +24В, через линию Rл1 достигает клеммы датчика +AO2, проходит через датчик и через выходной контакт датчика — AO2, соединительную линию Rл2, резистор Rш возвращается на клемму источника питания -24В. Все, цепь замкнулась, ток течет.
В случае, если контроллер содержит источник питания 24В, то подключение датчика или измерительного преобразователя возможно по схеме, показанной на рисунке 6.
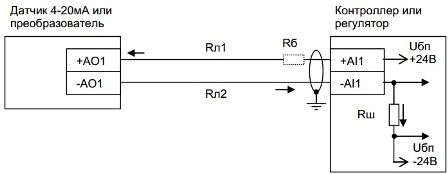
Рисунок 6. Подключение аналогового датчика к контроллеру с внутренним источником питания
На этой схеме показан еще один элемент – балластный резистор Rб. Его назначение защита измерительного резистора при замыкании линии связи или неисправности аналогового датчика. Установка резистора Rб необязательна, хотя и желательна.
Кроме различных датчиков токовый выход имеют также измерительные преобразователи, которые в системах автоматизации используются достаточно часто.
Измерительный преобразователь – устройство для преобразования уровней напряжения, например, 220В или тока в несколько десятков или сотен ампер в токовый сигнал 4…20мА. Здесь просто происходит преобразование уровня электрического сигнала, а не представление некоторой физической величины (скорость, расход, давление) в электрическом виде.
Но единственным датчиком дело, как правило, не обходится. Одними из самых популярных измерения являются измерения температуры и давления. Количество таких точек на современных производствах может достигать нескольких десятков тысяч. Соответственно и количество датчиков тоже велико. Поэтому к одному контроллеру чаще всего подключается сразу несколько аналоговых датчиков. Конечно же, не сразу несколько тысяч, хорошо, если десяток – другой. Такое подключение показано на рисунке 7.
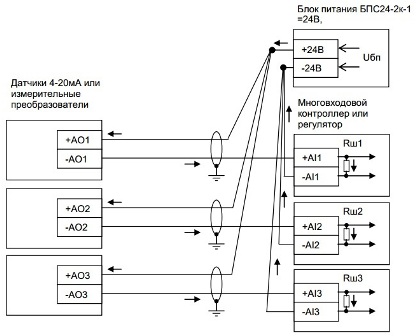
Рисунок 7. Подключение нескольких аналоговых датчиков к контроллеру
На этом рисунке показано, как из токового сигнала получается напряжение, пригодное для преобразования в цифровой код. Если таких сигналов несколько, то обрабатываются они не все сразу, а разделяются по времени, мультиплексируются, в противном случае на каждый канал пришлось бы ставить отдельный АЦП.
Для этой цели контроллер имеет схему коммутации каналов. Функциональная схема коммутатора показана на рисунке 8.
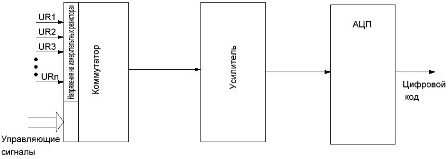
Рисунок 8. Коммутатор каналов аналоговых датчиков (картинка кликабельна)
Сигналы токовой петли, преобразованные в напряжение на измерительном резисторе (UR1…URn) поступают на вход аналогового коммутатора. Управляющие сигналы поочередно пропускают на выход один из сигналов UR1…URn, которые усиливаются усилителем, и поочередно поступают на вход АЦП. Преобразованное в цифровой код напряжение поступает в контроллер.
Схема, конечно, очень упрощенная, но принцип мультиплексирования в ней рассмотреть вполне возможно. Примерно так построен модуль ввода аналоговых сигналов контроллеров МСТС (микропроцессорная система технических средств) выпускавшихся смоленским ПК «Пролог». Внешний вид контроллера МСТС показан на рисунке 9.

Рисунок 9. Контроллер МСТС
Выпуск таких контроллеров давно уже прекращен, хотя в некоторых местах, далеко не лучших, эти контроллеры служат до сих пор. На смену этим музейным экспонатам приходят контроллеры новых моделей, в основном импортного (китайского) производства.
Для подключения токовых датчиков 4…20мА рекомендуется использовать двухпроводный экранированный кабель с сечением жил не менее 0,5 мм2.
Если контроллер смонтирован в металлическом шкафу, то экранирующие оплетки рекомендуется подключать к точке заземления шкафа. Длина соединительных линий может достигать двух с лишним километров, что рассчитывается по соответствующим формулам. Считать здесь ничего не будем, но поверьте, что это так.
Новые датчики, новые контроллеры
С приходом новых контроллеров появились и новые аналоговые датчики, работающие по протоколу HART (Highway Addressable Remote Transducer), что переводится как «Измерительный преобразователь, адресуемый дистанционно через магистраль».
Выходной сигнал датчика (полевого устройства) представляет собой аналоговый токовый сигнал диапазона 4…20мА, на который накладывается частотно модулированный (FSK — Frequency Shift Keying) сигнал цифровой связи.
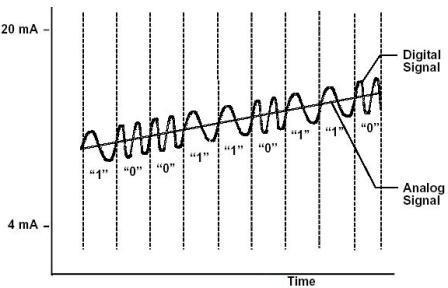
Рисунок 10. Выходной сигнал аналогового датчика по протоколу HART
На рисунке показан аналоговый сигнал, а вокруг него, как змея, извивается синусоида. Это и есть частотно – модулированный сигнал. Но это еще вовсе не цифровой сигнал, его еще предстоит распознать. На рисунке заметно, что частота синусоиды при передаче логического нуля выше (2,2КГц), чем при передаче единицы (1,2КГц). Передача этих сигналов осуществляется током амплитудой ±0,5мА синусоидальной формы.
Известно, что среднее значение синусоидального сигнала равно нулю, поэтому, на выходной ток датчика 4…20мА передача цифровой информации влияния не оказывает. Такой режим используется при настройке датчиков.
Связь по протоколу HART осуществляется двумя способами. В первом случае, стандартном, по двухпроводной линии могут обмениваться информацией только два устройства, при этом выходной аналоговый сигнал 4…20мА зависит от измеряемой величины. Такой режим применяется при настройке полевых устройств (датчиков).
Во втором случае к двухпроводной линии может быть подключено до 15 датчиков, количество которых определяется параметрами линии связи и мощностью блока питания. Это режим многоточечной связи. В этом режиме каждый датчик имеет свой адрес в диапазоне 1…15, по которому к нему обращается устройство управления.
Датчик с адресом 0 от линии связи отключен. Обмен данными между датчиком и устройством управления в многоточечном режиме осуществляется только частотным сигналом. Токовый сигнал датчика зафиксирован на необходимом уровне и не изменяется.
Под данными в случае многоточечной связи подразумеваются не только собственно результаты измерений контролируемого параметра, но еще и целый набор всевозможной служебной информации.
В первую очередь это адреса датчиков, команды управления, параметры настройки. И вся эта информация передается по двухпроводным линиям связи. А нельзя ли избавиться и от них? Правда, делать это надо осторожно, лишь в тех случаях, когда беспроводное соединение не сможет повлиять на безопасность контролируемого процесса.
Оказывается, избавиться от проводов можно. Уже в 2007 году был опубликован Стандарт WirelessHART, средой передачи является нелицензируемая частота 2,4ГГц, на которой работают многие компьютерные беспроводные устройства, в том числе и беспроводные локальные сети. Поэтому и WirelessHART-устройства можно использовать без всяких ограничений. На рисунке 11 показана беспроводная сеть WirelessHART.
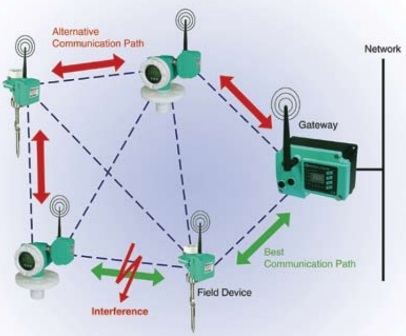
Рисунок 11. Беспроводная сеть WirelessHART
Вот такие технологии пришли на смену старой аналоговой токовой петле. Но и она свои позиции не сдает, широко применяется везде, где это возможно.
Источник