Система стабилизации горизонта (Разработка)
Visualman
Заделал одноместный мини танк, аля Валли из мультика.
Просто большое пластиковое корыто и 2 гусянки с бензо движками, по одному на каждую. Вдаваться не будем, оно уже ездит )
Разработка мне нужна следующая:
Я назвал её — Система стабилизации горизонта.
Arduino, с датчиком наклона. Когда по датчику угол == 0 (0 мы выставим сами); — ни чего не происходит.
Когда по датчику идёт data в ту или иную сторону, Arduino шлёт команду на линейные приводы,
которые неким образом (о котором я расскажу человеку, который возьмётся за разработку),
выравнивают всю конструкцию по горизонту (пытаются это сделать, на сколько хватит длины штока линейного привода (там просто сработают концевики)).
Схемотехника должна быть построена на ARDUINO NANO ATmega328p с припаянной гребёнкой,
чтобы замена модулей не требовала пайки и была быстрой и простой.
Все требующиеся компоненты я готов оплатить переводом на сбер.
Я с Али не работал и у меня много других дел. Всё заказываете сами.
1. Разработчик должен быть из Москвы или очень ближайшего подмосковья. Т.к. будут очные встречи по данному проекту.
2. Разработчик должен иметь большой опыт разработки на платформах Arduino, а так же иметь достаточные знания по слаботочке.
(Я не хочу наткнуться на новичка, который подумал себе ‘а может и получится, давай попробую’.
Данный шаг разработки будет сдерживать последующую разработку, так что сюрпризы мне не нужны, сами поймите).
Я бы с удовольствием заказал данную разработку много и глубоко уважаемому мной AlexGyver’у, но сами знаете.
По оплате:
Как уже говорил, покупаете всё сами. Я перевожу деньги на сбер. Всё конечно после первой очной встречи и объяснения мной на пальцах, чего я хочу.
Оплата будет оговорена с разработчиком при первой очной встрече.
Живу у метро Ховрино. Долгопрудный/Химки/Лобня — тоже подойдут, если разработчик будет из тех краёв.
Мои контакты:
Skype: visualman_acronis
Мыло: visualman2@rambler.ru
Ну и в форуме пишите, если непонятны какие то моменты.
Источник
Ловим горизонт с Arduino
В комментариях поста про создание трех-степенной платформы на базе аппаратной платформы Arduino поднимался вопрос управления не только с компьютера, поэтому было решено разобраться с работой акселерометра MMA7260, который можно свободно приобрести в Гонконге на Ebay. 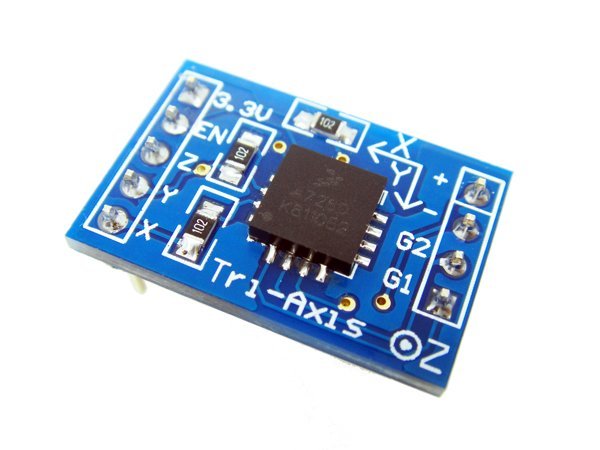
Инструменты и материалы
Для реализации задуманного нам понадобятся следующие комплектующие:
| Найменование | Количество |
| Акселерометр MMA7260 | 1 шт. |
| Трех-степенная платформа | 1 шт. |
| Макетная плата | 1 шт. |
| Стяжка | 1 шт. |
| Соединительные провода | 8 шт. |
| Белый медведь | 1 шт. |
Самой необходимой деталью для нашей установки является акселерометр. На просторах сети имеется множество предложения для Arduino в части акселерометров и самый доступный — это трех-осевой акселерометр MMA7260. В продаже он уже поставляется на плате, где уже имеется стабилизатор 3,3в 800мА для питания. На выходах осей X, Y, Z распаяны фильтры в виде RC-цепочек, а также сам он имеет фильтр низких частот (что не очень заметно при первом знакомстве).
В соответствии с документацией на устройство, имеется возможность выбора чувствительности (4 режима), а также включение и выключения режима сна. Настройка чувствительности датчика осуществляется с помощью входов G1 и G2. Максимальный уровень чувствительности 1.5g (00), минимальный 6g (11).
Схема подключения
Подключение акселерометра к плате Arduino осуществляется по схеме, представленной ниже: 
Чтобы акселерометр всегда выдавал значения его принудительно необходимо вывести из режима сна, просто подав на выход SL (Sleep) питание. Выбор режима чувствительности осуществляется с помощью перемычек J1 и J2.
Первоначально данную схему можно собрать на макетной плате, после чего можно распаять длинные проводки. Перемычки ставятся на контактную площадку 3х2, где крайние левые два контакта 3.3в, центральные G1 и G2 соответственно, а крайние правые контакты «земля».
В результате после сборки получается следующая конструкция: 
Подключение трехстепенной платформы к Arduino осуществляется на три выхода с поддержкой ШИМ, а входы от датчика положения на три аналоговых входа A0. A2. Пример подключения узлов к Arduino: 
Программирование
- int x, y, z;
- // Калибровка датчика
- int dx=357;
- int dy=385;
- int dz=178;
- void setup()
- <
- Serial.begin(9600);
- >
- void loop()
- <
- // Значения осей с датчика
- x = analogRead(A0) — dx;
- y = analogRead(A1) — dy;
- z = analogRead(A2) — dz;
- // Вывод в Serial monitor
- Serial.print( «X: » );
- Serial.print(x);
- Serial.print( «Y:» );
- Serial.print(y);
- Serial.print( «Z:» );
- Serial.println(z);
- //Период опроса
- delay(100);
- >
* This source code was highlighted with Source Code Highlighter .
Тестирование
Перед началом работы, необходимо произвести калибровку датчика, по следующей методике:
1) Установить в прошивке контроллера значения калибровки равные нулю, записать прошивку в контроллер;
2) Зафиксировать датчик в горизонтальном положении;
3) Снять показания с датчика в течение 3 секунд;
4) Вычислить средние значения в горизонтальном положении и внести поправку в калибровочные значения.
Данные измерения необходимо делать на минимальной чувствительности или близкой к ней, чтобы исключить лишние показания при ударах стала или любые другие воздействия.
До проведения калибровки датчик выдавал следующие значения:
По графику видно, что завяленные фильтры низких частот работают довольно странно, так как шумят оси очень сильно. Для подавления шума необходимо или писать свой фильтр низких частот или нормировать шкалу измерений к меньшей (в случае с сервоприводами шум частично подавляется таким методом).
В результате полученных измерений были получены следующие поправки:
- dx = 357
- dy = 385
- dz = 178
После калибровки показания датчика стали показывать реальную картину:
В таком виде уже можно использовать показания датчика в своих проектах.
Результат
UPD. Программная фильтрация сигнала осуществляется по алгоритму, представленному в википедии:
function lowpass(real[0..n] x, real dt, real RC)
var real[0..n] y
var real α := dt / (RC + dt)
y[0] := x[0]
for i from 1 to n
y[i] := α * x[i] + (1-α) * y[i-1]
return y
* This source code was highlighted with Source Code Highlighter .
* This source code was highlighted with Source Code Highlighter .
Источник
Датчик горизонта для автовышки

Автовышки – универсальная высотная спецтехника, используемая для решения различных задач, связанных с подъемом на высоту людей и грузов. Применение АГП для транспортировки людей обуславливает повышенные требования к технике безопасности и правилам эксплуатации оборудования.
Защитные элементы автовышки
Для обеспечения безопасности персонала, работающего на автоподъемнике, высотная спецтехника оснащается специальным оборудованием:
- Система ориентации платформы – отвечает за удержание люльки в нужном положении.
- Система аварийного спуска – обеспечивает экстренную эвакуацию рабочих при неполадках гидравлики, возникновении внештатных ситуаций.
- Конечные выключатели – сокращают зону обслуживания, уменьшают угол раскрытия колен.
- Блокираторы – ограничивают подъем колен/гидроопор при нахождении АГП в верхнем положении.
- Гидравлические цилиндры и замки.
- Кнопки для аварийного торможения мотора подъемника непосредственно с рабочей платформы.
- Дополнительные кнопки на ПДУ диспетчера и в кабине управления АГП, обеспечивающие аварийную остановку устройства.
- Индикаторы-сигнализаторы в управляющей кабине и в люльке.
- Ограничители грузоподъемности, предотвращающие подъем платформы с излишним грузом.
- Боковые ограничители – не позволяют коленам перемещаться при работе подъемного механизма.
Вышеназванное оборудование и устройства объединяются электронными средствами в единую систему. Диспетчер на дисплее наблюдает за всеми рабочими параметрами, положением механизма, что обеспечивает максимальную осведомленность по поводу всех происходящих процессов рабочими и операторами.
Защитные механизмы телескопических/коленчатых АГП
Коленчатые автовышки оснащаются системами специального назначения, обеспечивающими повышенную безопасность. Оборудование ограничивает угол раскрытия колена, снижают опрокидывающий момент, что существенно повышает устойчивость всей спецтехники. Благодаря ограничению угла исключается возможность возникновения перегрузок либо столкновения. Подобная защита устанавливается на автогидроподъемниках серии АГП.
Одним из основных элементов конструкции является выключатель на гидрораспределителе. Он расположен возле оси подвеса люльки. Оснащенная системой защиты и ориентации люлька при отклонении от горизонта на 80 градусов активирует движение кулачка с гидрораспределителем. Нажатие выключателя вызывает блокировку колен, которые перестанут смещаться в сторону расширения угла.
Телескопические автовышки от 15 м оборудуются иными системами безопасности. Выдвижение телескопа ограничивается благодаря коробке отворота мощности. Параллельно выключается питание лебедки на телескопе. В максимальной точке поднятия за счет натяжения каната лебедка выключается автоматически. Нередко функцию ограничителя осуществляет предохранительный клапан, активирующийся при росте давления, возникающем при крайнем положении цилиндра.
Источник
Датчик приближения к ЛЭП для автовышек, автогидроподъемников

| | | |
Датчик приближения к ЛЭП для автовышек, автогидроподъемников
Наша компания продает датчики приближения к ЛЭП и другое оборудование, в России, странах СНГ и ближнем зарубежье. Мы работаем на этом сложном рынке более 10 лет. ООО «Кран-Мастер» давно заслужило репутацию надежного делового партнера, тщательно соблюдающего взятые на себя обязательства. Одно из наших основных преимуществ – цены, которые мы специально удерживаем ниже на 5-10%, чем среднерыночные. Кроме этого нашими преимуществами являются комплексные услуги (ремонт, транспортировка, обслуживание тяжелой техники) и индивидуальный подход к каждому контракту. Покупая у нас датчики приближения к ЛЭП для автовышек или другой техники, вы можете быть уверены в том, что приобретаете оригинальное оборудование.
Автовышки и автогидроподъемники
Это одна из разновидностей специальной техники, основное назначение которой – доставка на заданную высоту одного или нескольких человек, для выполнения высотных работ разной сложности: починка ЛЭП, фасадные работы, обрезка зеленых насаждений, мойка окон и т. п. Автогидроподъемники состоят из автомобильного шасси, стрелы, управляемой гидросистемой, люльки, расположенной на вершине стрелы, в которой находятся люди, выполняющие высотные работы. Грузоподъемность автовышек варьирует от 80 до 600 кг, а высота подъема люльки от 6 до 100 м.
Описание и назначение датчика приближения к ЛЭП (УАС-1М-1) для автовышек и автогидроподъемников
Автоматический универсальный сигнализатор (так расшифровывается УАС) предназначен для предотвращения столкновения стрелы автовышки или ее платформы (люльки) с высоковольтными линиями электропередач. Прибор может работать в диапазоне 0,22-750 кВ.
Внимание! УАС-1М-1, в отличие от более современных систем, не может самостоятельно блокировать приближение стрелы к линии электропередач. Прибор подает световой и звуковой сигнал, а решение об остановке машины или операции принимает механизатор.
Зона срабатывания датчика приближения к ЛЭП (УАС-1М-1):
- 3 м – напряжение 0,22-1кВ;
- 4 м – напряжение 1-20 кВ;
- 8 м – напряжение 35-110 кВ;
- 10м – напряжение 150-220 кВ;
- 18 м – напряжение 300-750 кВ.
Внимание! Приборы УАС чувствительны к погодным условиям. Повышенная влажность воздуха, приближающаяся гроза могут повлиять на работу датчика приближения к ЛЭП (УАС-1М-1) для автогидроподъемников. Это следует учитывать при установке прибора на технику.
Условия эксплуатации датчика приближения к ЛЭП (УАС-1М-1):
- нагрузка вибрационная – 50 Гц;
- ударная нагрузка с ускорением – 100 м/с2;
- макс. влажность воздуха – 95%;
- температурные пределы – от -40 до +55 град.
Основные характеристики датчика приближения к ЛЭП (УАС-1М-1):
- масса основного блока – до 4 кг;
- габариты основного (усилительно-исполнительного) блока – 267х217х119 мм;
- габариты антенны 265х130х41 мм;
- питание – бортовая сеть 12 или 24 В;
- частота автоконтроля – 0,5-2 Гц;
- ток потребляемый – до 3А.
Преимущества и недостатки датчика приближения к ЛЭП (УАС-1М-1)
Антенны датчиков УАС емкостные, то есть, они реагируют не на само электрическое поле ЛЭП, а на изменение в поле, возникающие при приближении к проводам, находящимся под напряжением, стрелы или люльки. Из-за емкостных антенн применение датчиков УАС-1 М-1 затруднено на дизель-электрических гусеничных кранах.
У датчика приближения к ЛЭП УАС-1 М-1 есть и другие недостатки. Например, их уже не выпускают, поэтому найти их и комплектующие к ним может быть непросто. Впрочем, если вы обратитесь с этим вопросом в ООО «Кран-Мастер», то мы найдем для вас и комплектующие и сам прибор. Также следует отметить, что антенны данного датчика подключаются последовательно, это значит, что при выходе одной из них, другие также отключаются.
Преимущества датчика приближения к ЛЭП УАС-1 М-1:
- антенны от одного прибора серии УАС подходят к другим приборам этой же серии;
- прибор стоит дешевле более современных аналогов;
- прибор легко монтируется/демонтируется, прост в обслуживании.
Внимание! Устройство УАС-1 М-1 имеет внутренний контролирующий блок, который проверяет исправность прибора. При обнаружении неполадок устройство издает непрерывный световой и звуковой сигнал. Если устройство исправно, то подается сигнал «Исправен».
Другие приборы безопасности для манипуляторов, защищающие от столкновения с ЛЭП
Сегодня есть много других устройств, защищающих подъемную и крановую технику, в том числе и от соприкосновения с высоковольтными проводами. В основном это комплексные решения, где датчик приближения к ЛЭП является составной частью прибора безопасности, такого, как ОНК-140, обеспечивающего автовышке, экскаватору или крану координатную защиту. Оснащенный этим прибором манипулятор может без опасений работать не только вблизи линий электропередач, но и в непосредственной близости от зданий и т. п.
Кроме приборов ОНК, востребованы также устройства Барьер-1М. Они не только подают сигнал о приближении к линиям электропередач, но и самостоятельно останавливают движение стрелы, если машинист крана или автовышки не реагирует на сигнал тревоги.
Расстояние, на котором действует Барьер-1М
| Напряжение (кВ) | Подача сигнала опасности (м) | Автоматическая остановка (м) |
| 0,22-1 | 5 | 1,5-5 |
| 6-10 | 10 | 2-7 |
| 20-35 | 15 | 4-10 |
| 110-450 | 20 | 6-13 |
| 500-750 | 30 | 9-18 |
Если вам необходим прибор безопасности: ОНК-140, Барьер-1М и т. д., обратитесь к нашим специалистам по телефону: 8 (351) 222-30-43. Консультация БЕСПЛАТНАЯ.
Источник